
Planetaire zwenkaandrijving voor hoogwerkers
Een planetaire zwenkaandrijving is een compact mechanisch systeem met een hoog koppel, ontworpen voor nauwkeurige rotatiecontrole in hoogwerkers, zoals schaarhoogwerkers, giekhoogwerkers en heftrucks. Het integreert een planetair tandwielmechanisme met een zwenklager en aandrijfcomponenten, waardoor een soepele rotatie van 360 graden mogelijk is, terwijl het bestand is tegen aanzienlijke axiale, radiale en kantelkrachten. In hoogwerkers maakt een zwenkaandrijving het veilig en stabiel manoeuvreren van verhoogde werkbakken of gieken mogelijk, die zware lasten dragen tijdens onderhouds-, bouw- of inspectiewerkzaamheden.
Een planetaire zwenkaandrijving is een compact mechanisch systeem met een hoog koppel, ontworpen voor nauwkeurige rotatiecontrole in hoogwerkers, zoals schaarhoogwerkers, giekhoogwerkers en heftrucks. Het integreert een planetair tandwielmechanisme met een zwenklager en aandrijfcomponenten, waardoor een soepele rotatie van 360 graden mogelijk is, terwijl het bestand is tegen aanzienlijke axiale, radiale en kantelkrachten. Deze zwenkaandrijving beschikt doorgaans over meerdere planetaire trappen voor een verbeterde koppelvermeerdering en efficiëntie, en is ondergebracht in een afgesloten behuizing ter bescherming tegen omgevingsfactoren zoals stof, vocht en extreme temperaturen. In hoogwerkers maakt het de veilige en stabiele manoeuvreerbaarheid van verhoogde werkbakken of gieken mogelijk, die zware lasten dragen tijdens onderhouds-, bouw- of inspectiewerkzaamheden.
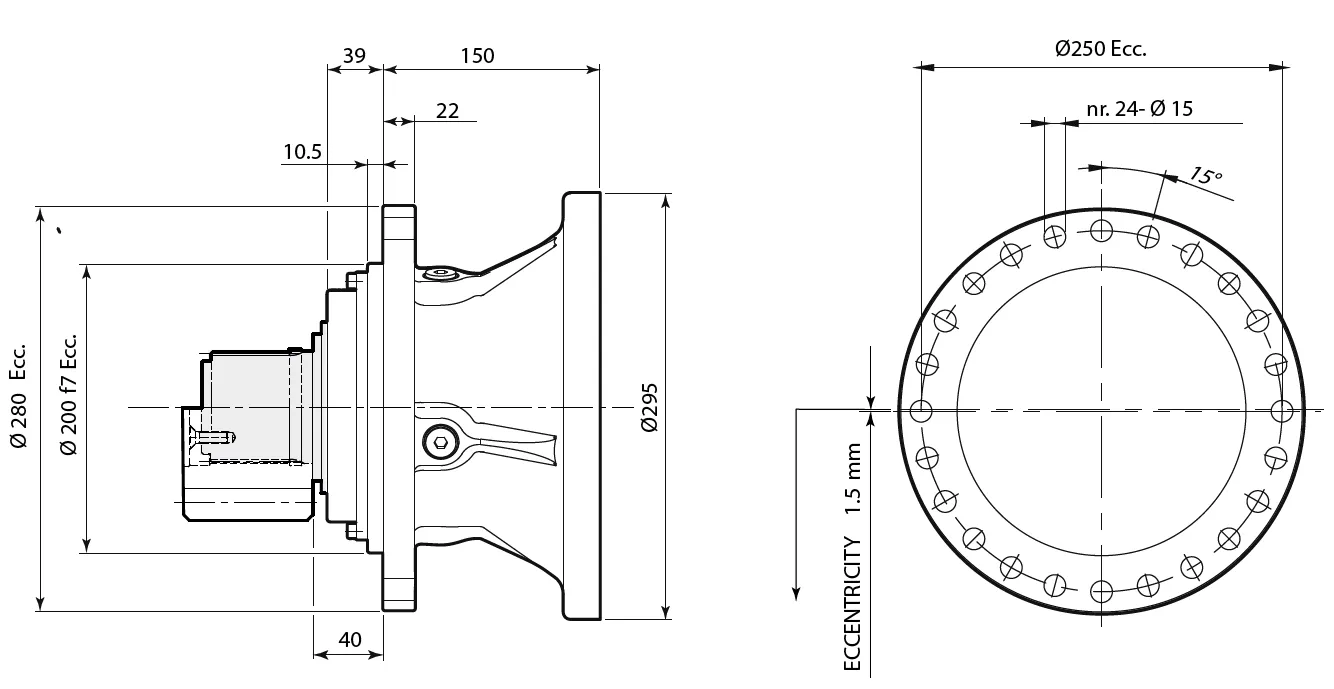
Afmetingen van planetaire zwenkaandrijving
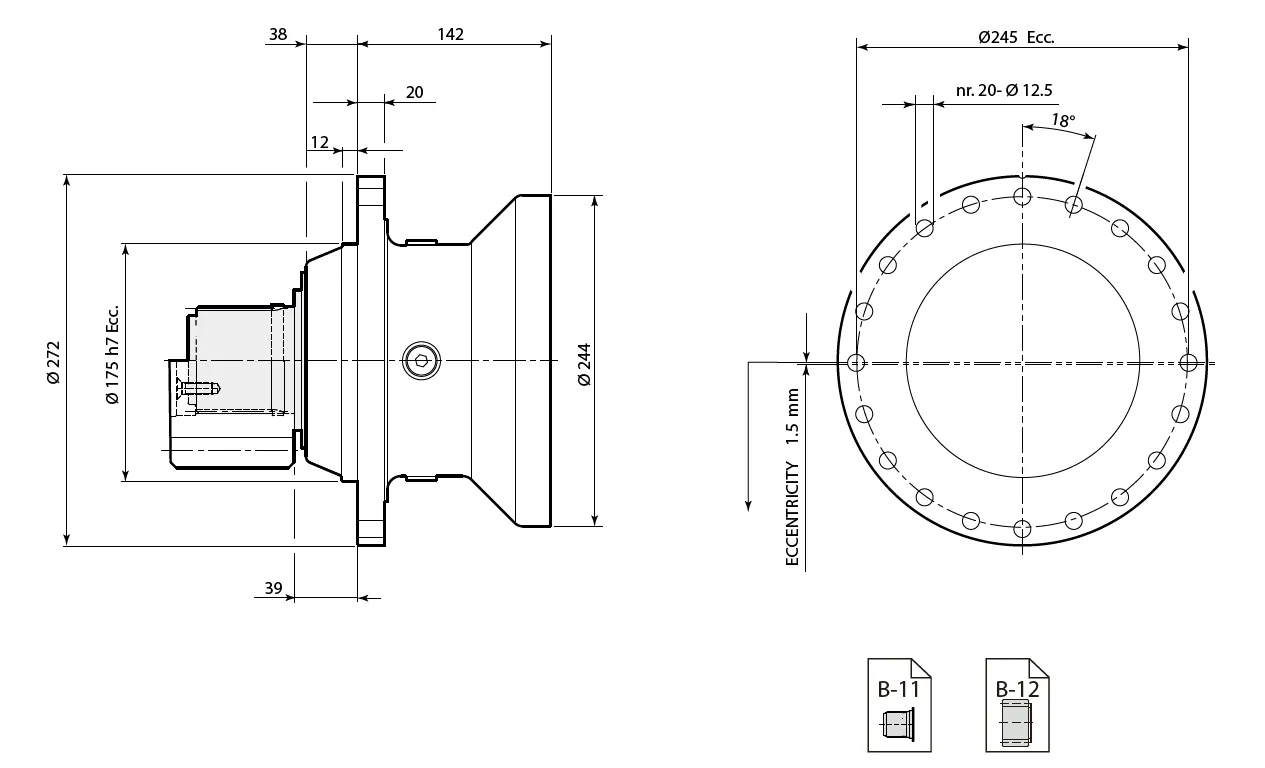
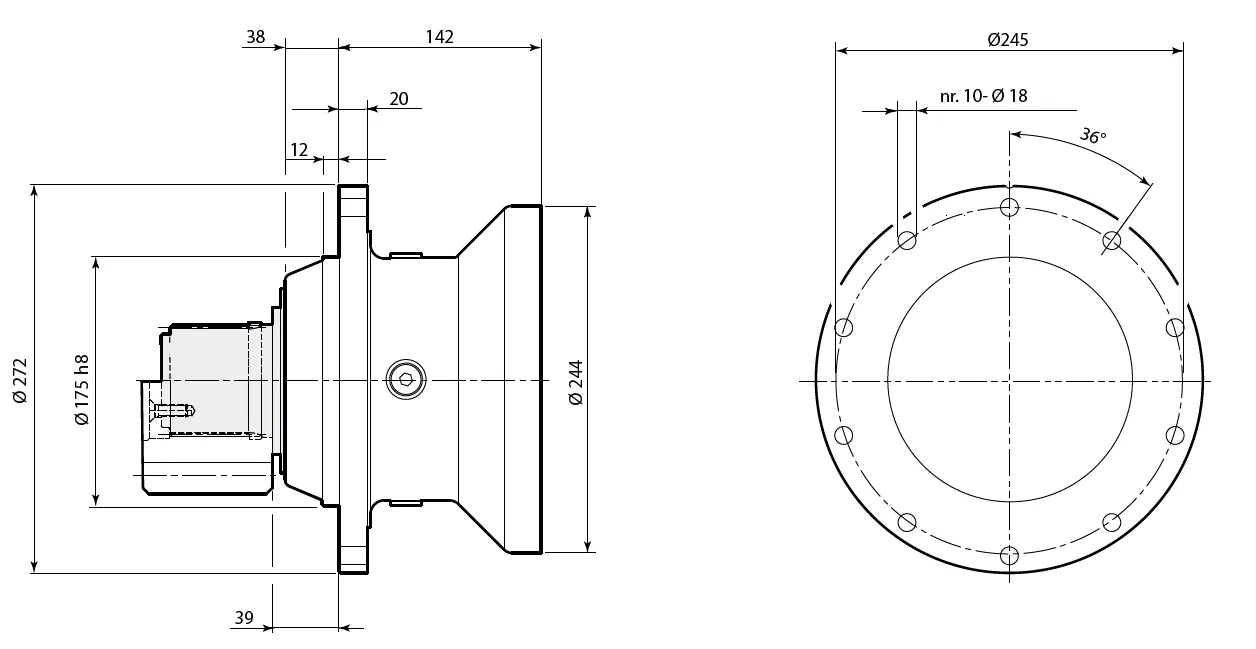
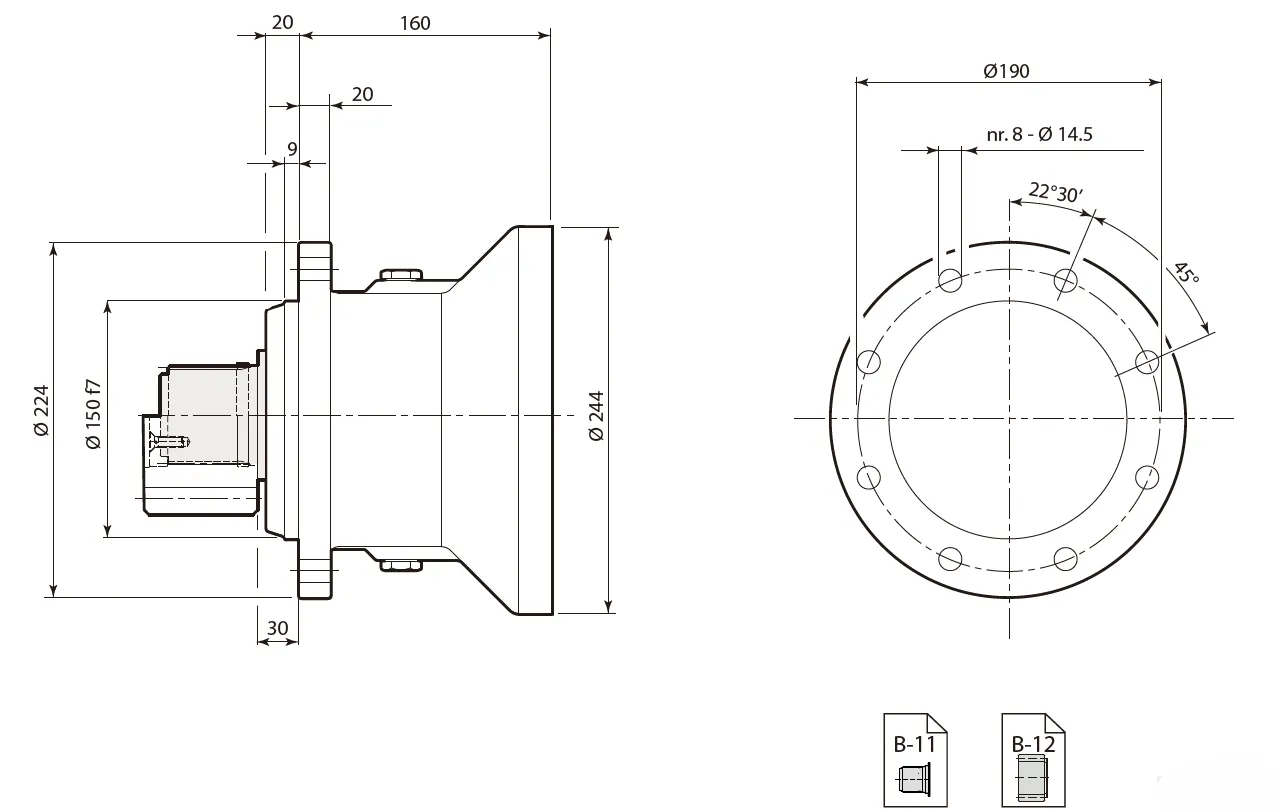
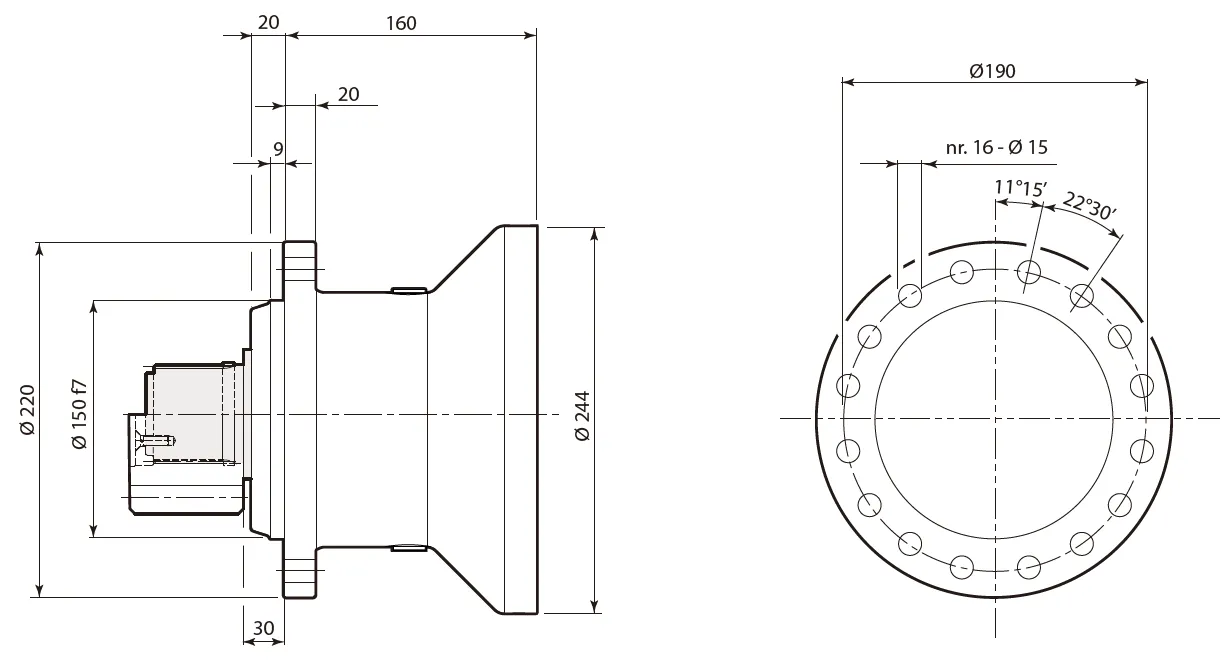
RE 240
Ondersteuning: DBS

Ondersteuning: Tecc
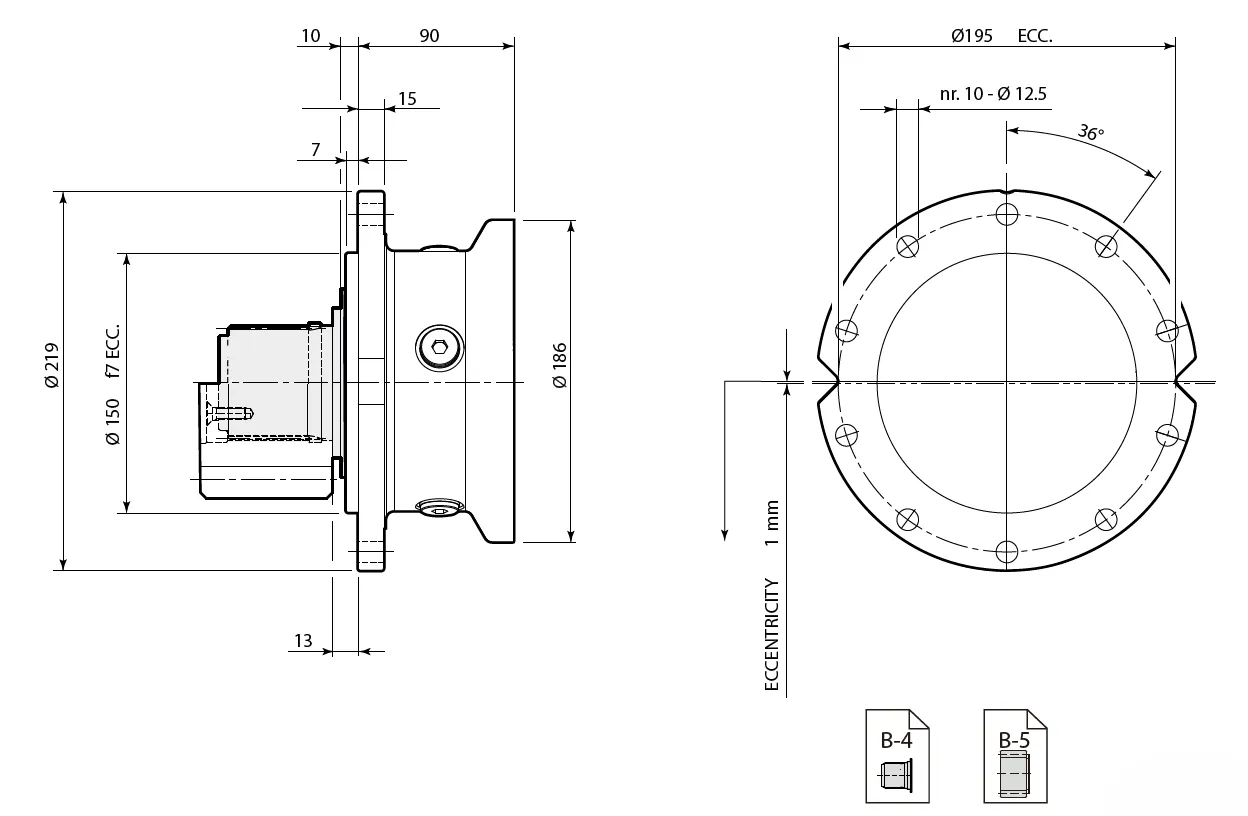
Gegroefde as:
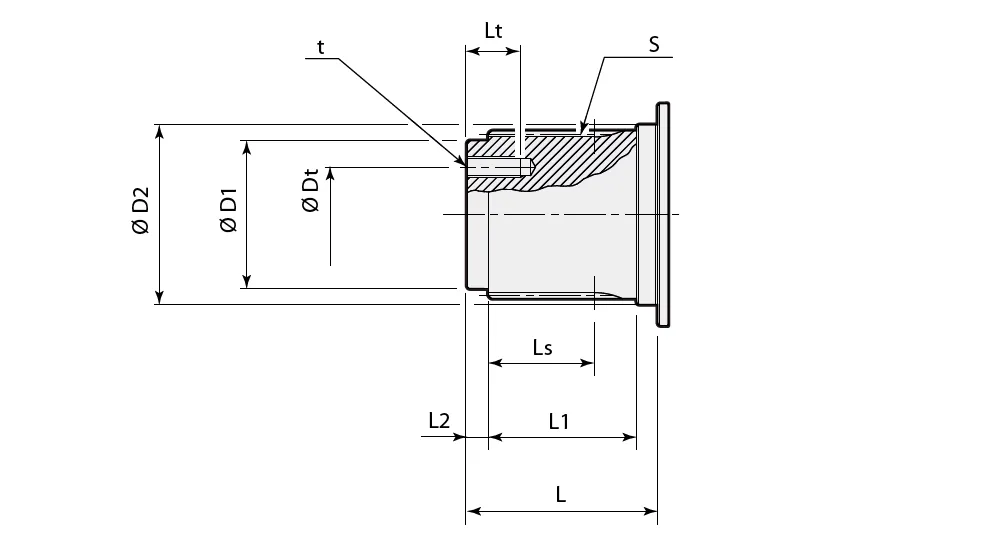
| Ondersteuning Steun | ØD1 | ØD2 | S | Ls | L | L1 | L2 | T | ØDt | Luitenant |
| [ mm ] | ||||||||||
| DBS | 50 uur 7 | 60 uur | DIN5482 B58x53 | 37 | 68.3 | 50 | 8 | M10 (nr. 3) | 32 | 21 |
| Tecc | 50 uur 7 | 60 uur | DIN5482 B58x53 | 37 | 68.3 | 50 | 8 | M10 (nr. 3) | 32 | 21 |
Tandwielen:
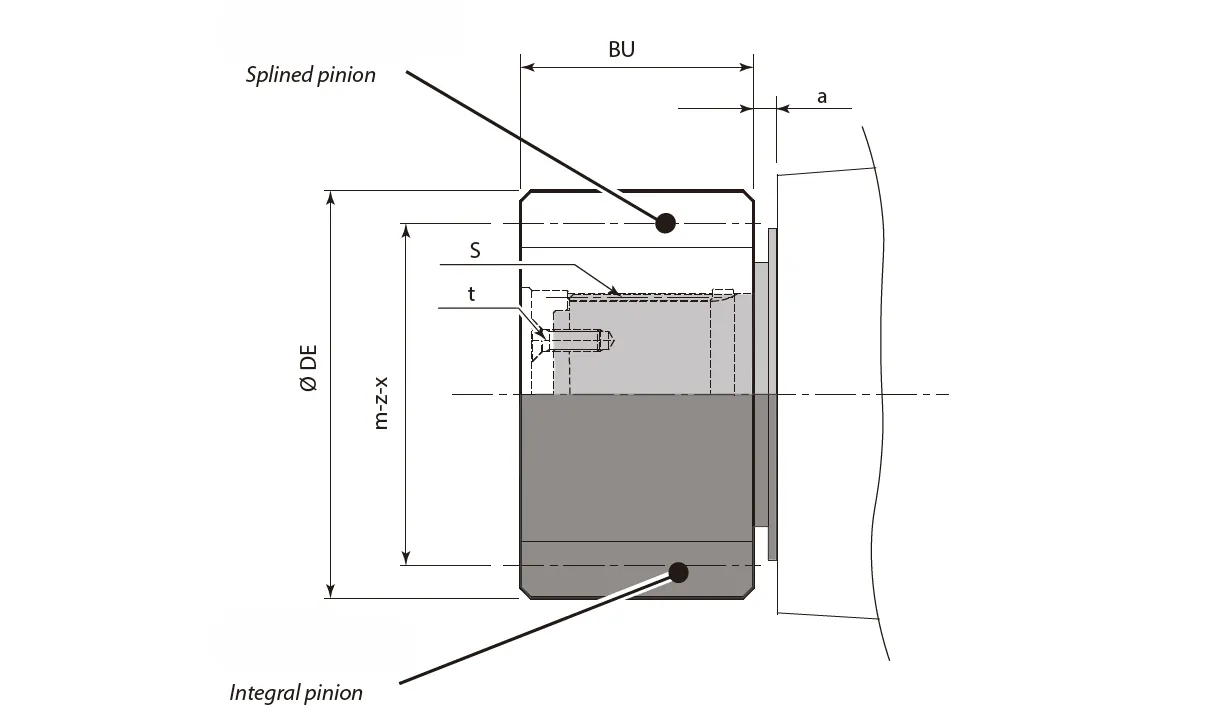
| Steun | M | z | X | ODE | BU | A | S | T | Tmax | |
| [mm] | Statisch [Nm] | Dynamisch [Nm] | ||||||||
| DBS | 6 | 15 | 0.5 | 108 | 88 | 2 | - | - | 6000 | 5400 |
| 8 | 9 | 0.5 | 95.2 | 96 | 0.5 | - | - | 5000 | 4500 | |
| 10 | 11 | 0.5 | 137 | 68 | 2 | - | - | 6300 | 5670 | |
| 14 | 13 | 0.5 | 224 | 70 | 2 | DIN5482 B58x53 | M10 (nr. 3) | 6300 | 5670 | |
| Tecc | 6 | 18 | 0 | 120 | 70 | 13.5 | DIN5482 B58x53 | M10 (nr. 3) | 6000 | 5400 |
| 8 | 10 | 0.5 | 104 | 80 | 13.5 | - | - | 5000 | 4500 | |
| 8 | 14 | 0.5 | 136 | 80 | 23.5 | DIN5482 B58x53 | M10 (nr. 3) | 6300 | 5670 | |
| 10 | 13 | 0 | 150 | 80 | 3.5 | DIN5482 B58x53 | M10 (nr. 3) | 6300 | 5670 | |
| 14 | 13 | 0,5 | 224 | 70 | 2 | DIN5482 B58x53 | M10 (nr. 3) | 6500 | 5670 | |
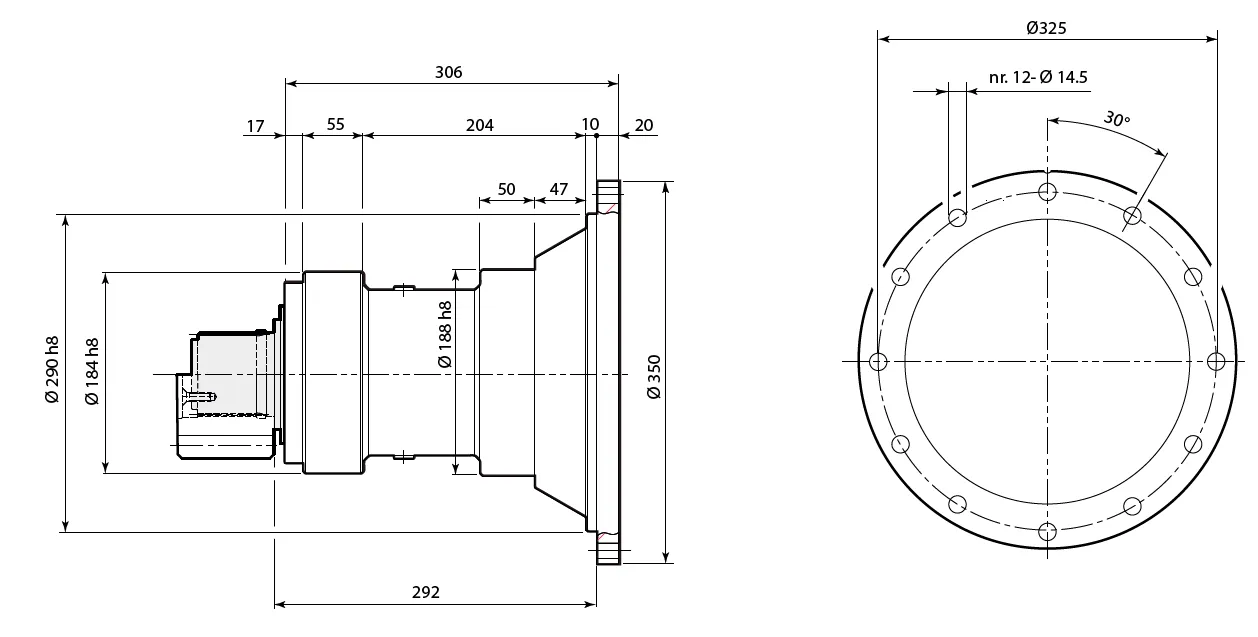
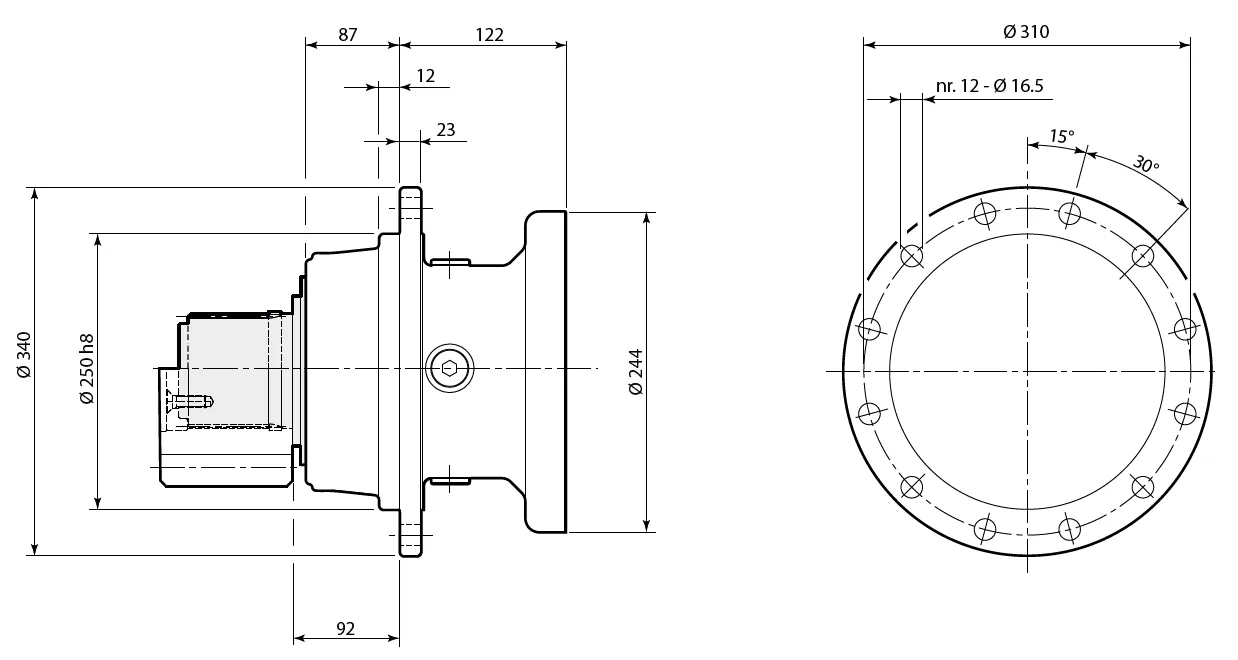
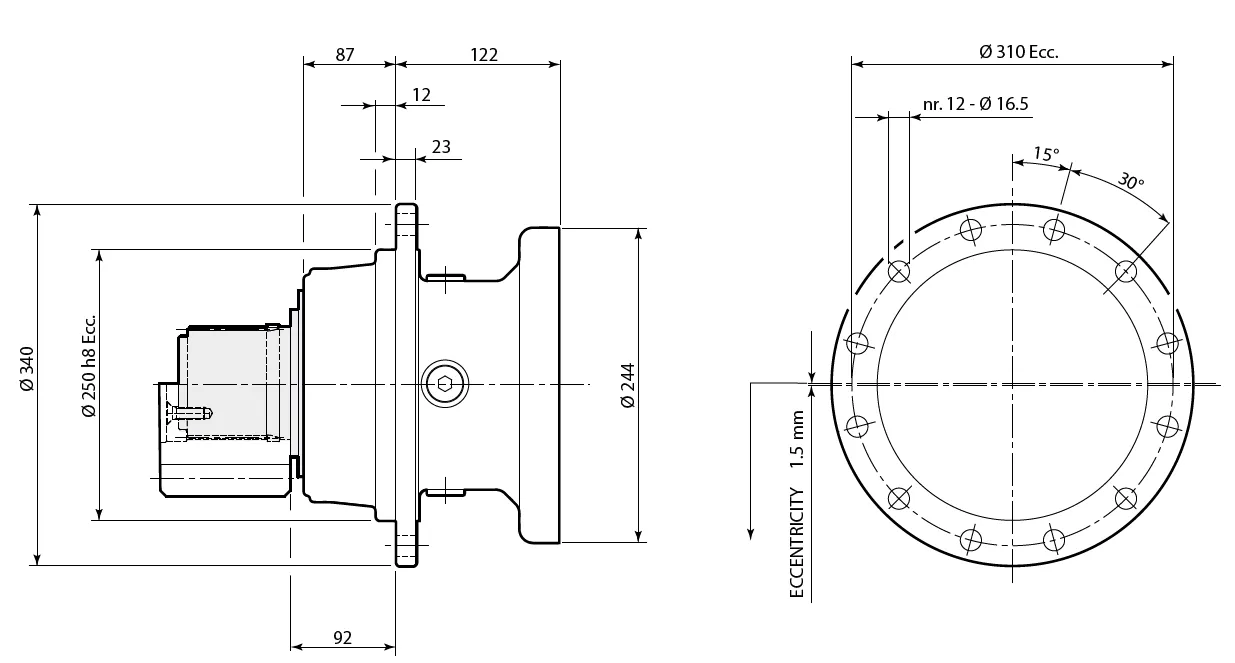
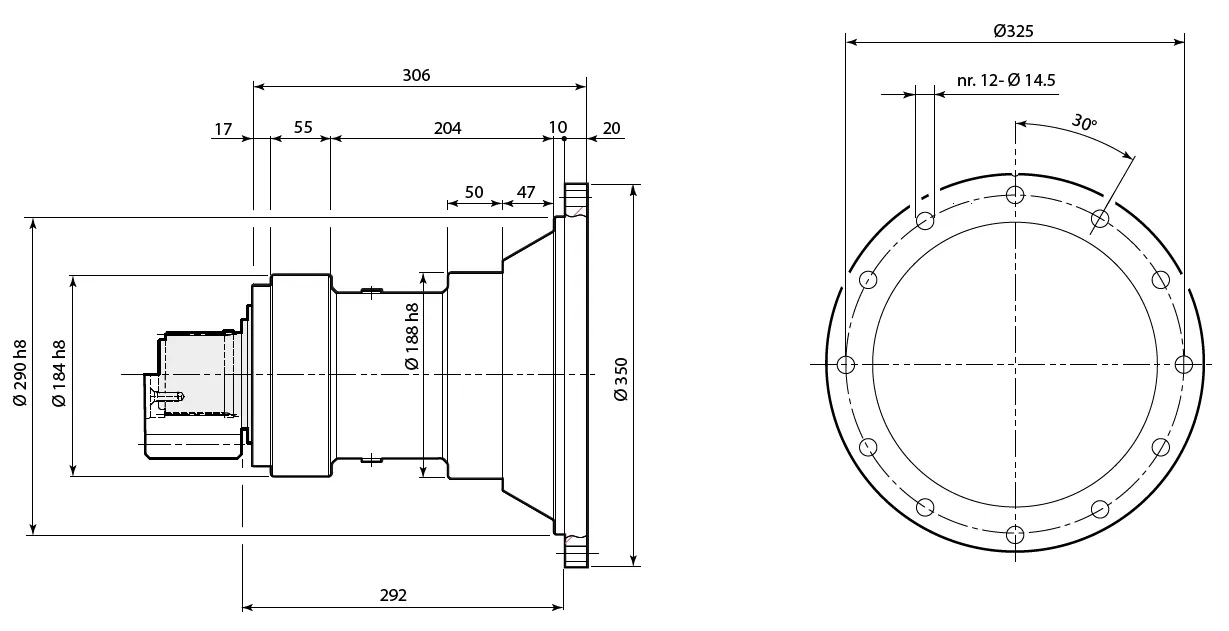
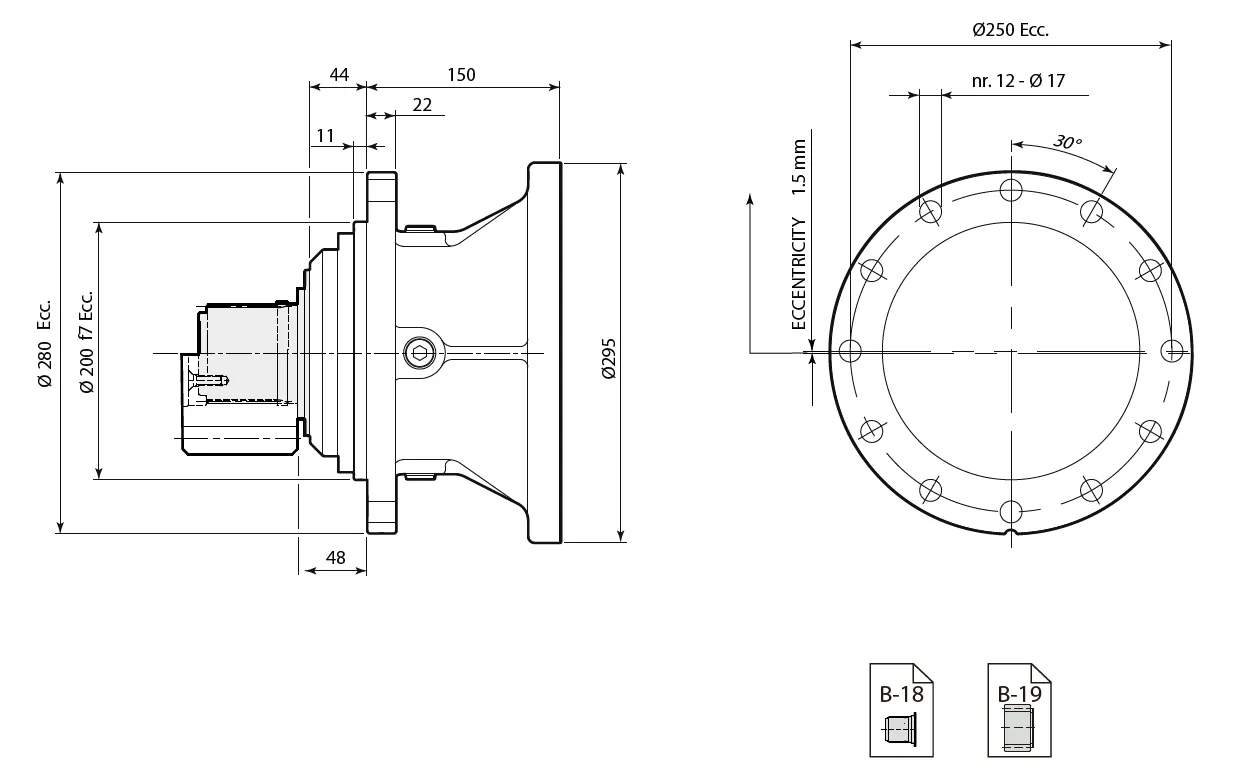
RE 310/510
Ondersteuning: DBS
Ondersteuning: Tecc
Ondersteuning: T6
Ondersteuning: T8

Ondersteuning: T18
Ondersteuning: NR
Ondersteuning: NR3
Schacht:
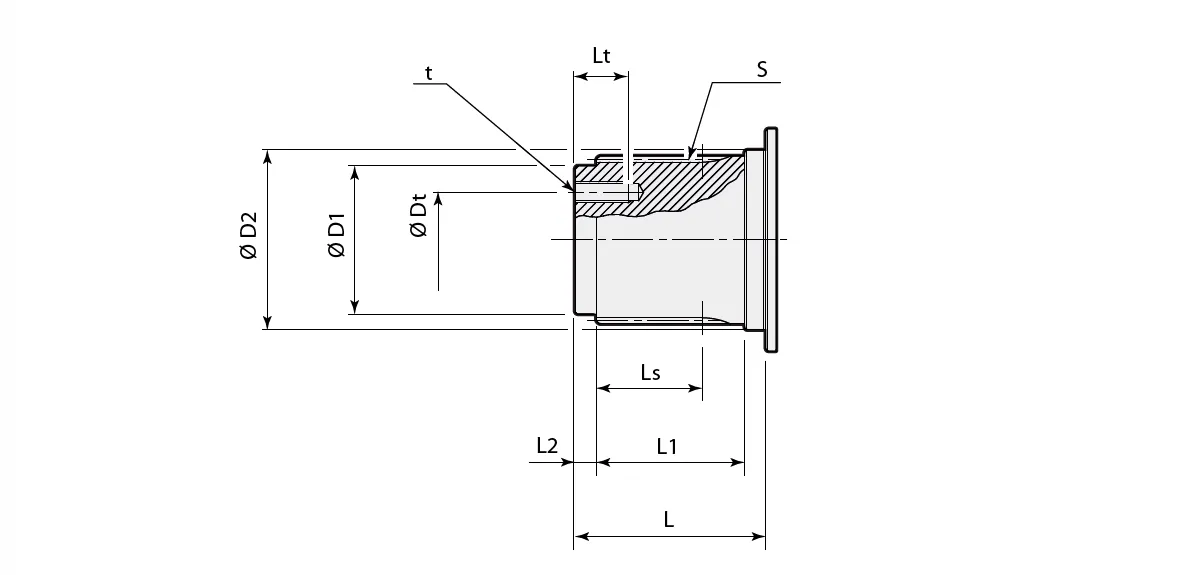
| Steun | ØD1 | ØD2 | S | Ls | L | L1 | L2 | T | ØDt | Luitenant |
| [ mm ] | ||||||||||
| DBS | 50 uur 7 | 60 uur | DIN5482 B58x53 | 46 | 78 | 60 | 8 | M10 (nr. 3) | 32 | 20 |
| Tecc | 50 uur 7 | 60 uur | DIN5482 B58x53 | 46 | 78 | 60 | 8 | M10 (nr. 3) | 32 | 20 |
| T6 | 50 uur 7 | 60 uur | DIN5482 B58x53 | 46 | 78 | 60 | 8 | M10 (nr. 3) | 32 | 20 |
| T8 | 50 uur 7 | 60 uur | DIN5482 B58x53 | 46 | 78 | 60 | 8 | M10 (nr. 3) | 32 | 20 |
| T18 | 62 F7 | 72 F7 | DIN5482 B70x64 | 51 | 90 | 70 | 10 | M10 (nr. 3) | 40 | 22 |
| NR | 50 uur 7 | 60 uur | DIN5482 B58x53 | 37 | 68.5 | 50 | 8 | M10 (nr. 3) | 32 | 20 |
| NR3 | 50 uur 7 | 60 uur | DIN5482 B58x53 | 37 | 68.5 | 50 | 8 | M10 (nr. 3) | 32 | 20 |
Tandwielen:
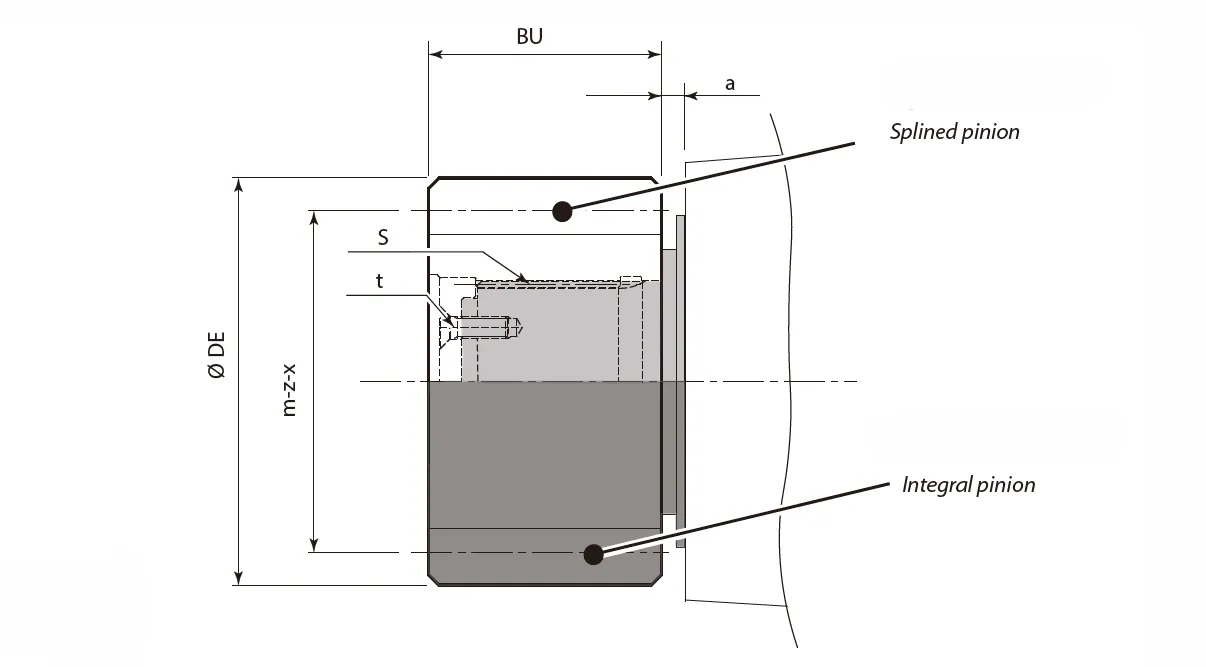
| Steun | M | z | X | ODE | BU | A | S | T | Tmax | |
| [mm] | Statisch [Nm] | Dynamisch [Nm] | ||||||||
| DBS | 8 | 11 | 0.5 | 112.2 | 78 | 7 | - | - | 10500 | 9450 |
| 9 | 13 | 0.5 | 144 | 75 | 7 | - | - | 10500 | 9450 | |
| 10 | 11 | 0.5 | 137 | 78 | 7 | - | - | 10500 | 9450 | |
| 10 | 15 | 0 | 170 | 90 | 10 | - | - | 10500 | 9450 | |
| 12 | 10 | 0.5 | 155 | 95 | 7 | - | - | 10500 | 9450 | |
| 12 | 11 | 0.5 | 166.8 | 80 | 7 | - | - | 10500 | 9450 | |
| Tecc | 6 | 13 | 0.65 | 97.2 | 65 | 27 | - | - | 6900 | 6210 |
| 8 | 11 | 0.5 | 111.2 | 88 | 4 | - | - | 8300 | 7470 | |
| 8 | 15 | 0 | 136 | 75 | 11 | DIN5482 B58x53 | M10 (nr. 3) | 10400 | 9360 | |
| 10 | 10 | 0.5 | 130 | 90 | 3 | - | - | 9500 | 8550 | |
| 14 | 14 | 0.5 | 236.6 | 100 | 1 | DIN5482 B58x53 | M10 (nr. 3) | 10500 | 9450 | |
| T6 T8 | 10 | 13 | 0.6 | 161 | 86 | 17 | - | - | 10500 | 9450 |
| 10 | 14 | 0.5 | 168 | 80 | 2.5 | - | - | 10500 | 9450 | |
| 10 | 12 | 0.55 | 150.5 | 93 | 3 | - | - | 10500 | 9450 | |
| 12 | 10 | 0.5 | 155 | 108 | 5.5 | - | - | 10500 | 9450 | |
| T18 | 8 | 14 | 0 | 128 | 79.5 | 16 | DIN5482 B70x64 | M10 (nr. 3) | 10500 | 9450 |
| 10 | 14 | 0.32 | 166.4 | 90 | 15 | 13200 | 11880 | |||
| 12 | 13 | 0.5 | 192 | 80 | 21 | 13200 | 11880 | |||
| 14 | 15 | 0.5 | 250.6 | 105 | 6 | 13200 | 11880 | |||
| NR NR3 | 5 | 22 | 0 | 120 | 50 | 27.5 | DIN5482 B58x53 | M10 (nr. 3) | 9250 | 8325 |
| 8 | 11 | 0.5 | 110.8 | 79 | 10.5 | - | - | 9250 | 8325 | |
| 8 | 16 | 0.5 | 149.5 | 73 | 20.5 | - | - | 9250 | 8325 | |
| 10 | 11 | 0.5 | 139 | 100 | 12 | - | - | 9250 | 8325 | |
| 10 | 12 | 0.5 | 149 | 90 | 19.5 | - | - | 9250 | 8325 | |
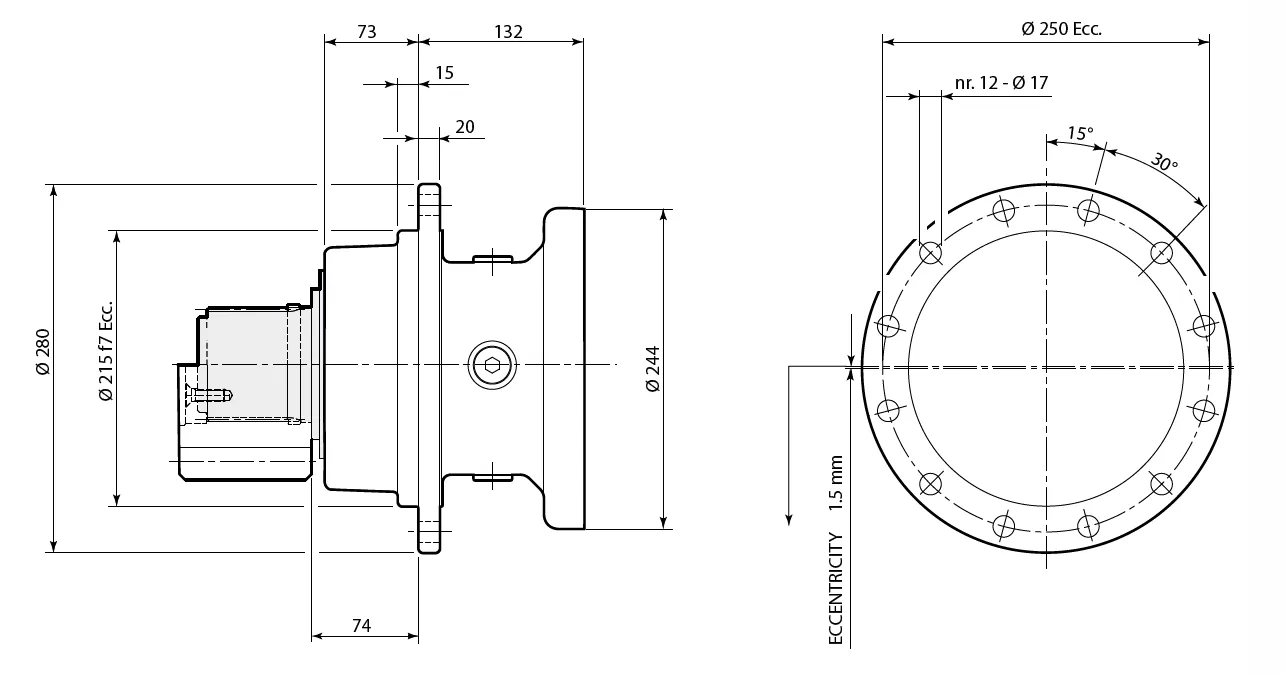
RE 610
Ondersteuning: DBS
Ondersteuning: DBS2
Ondersteuning: T18
Schacht:
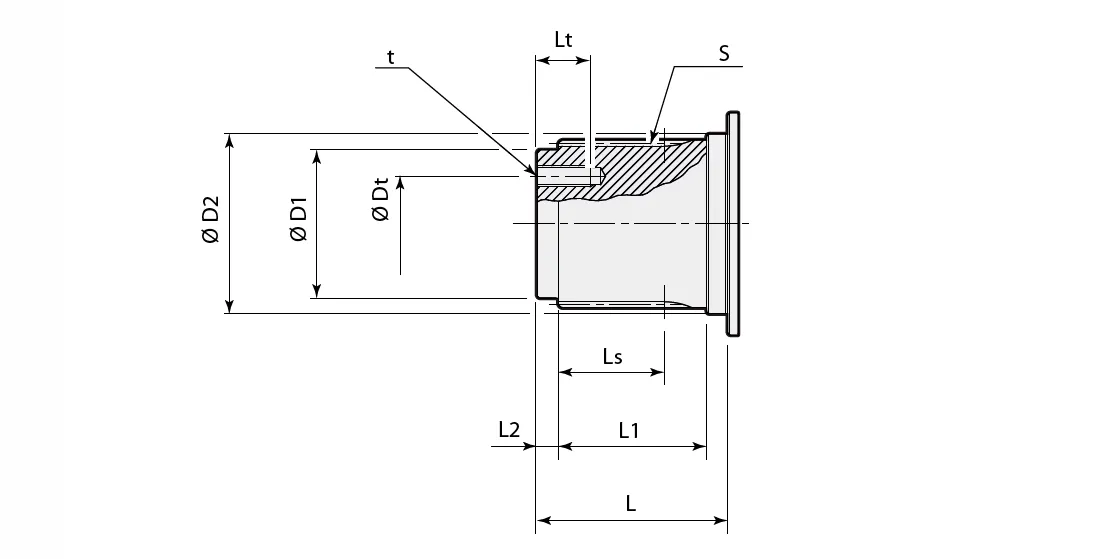
| Steun | ØD1 | ØD2 | S | Ls | L | L1 | L2 | T | ØDt | Luitenant |
| [ mm ] | ||||||||||
| DBS | 62 uur 7 | 72 uur 6 | DIN5482 B70x64 | 51 | 90 | 70 | 10 | M10 (nr. 3) | 40 | 22 |
| DBS2 | 62 uur 7 | 72 uur 6 | DIN5482 B70x64 | 51 | 90 | 70 | 10 | M10 (nr. 3) | 40 | 22 |
| T18 | 62 f7 | 72 f7 | DIN5482 B70x64 | 51 | 90 | 70 | 10 | M10 (nr. 3) | 40 | 22 |
Tandwielen:
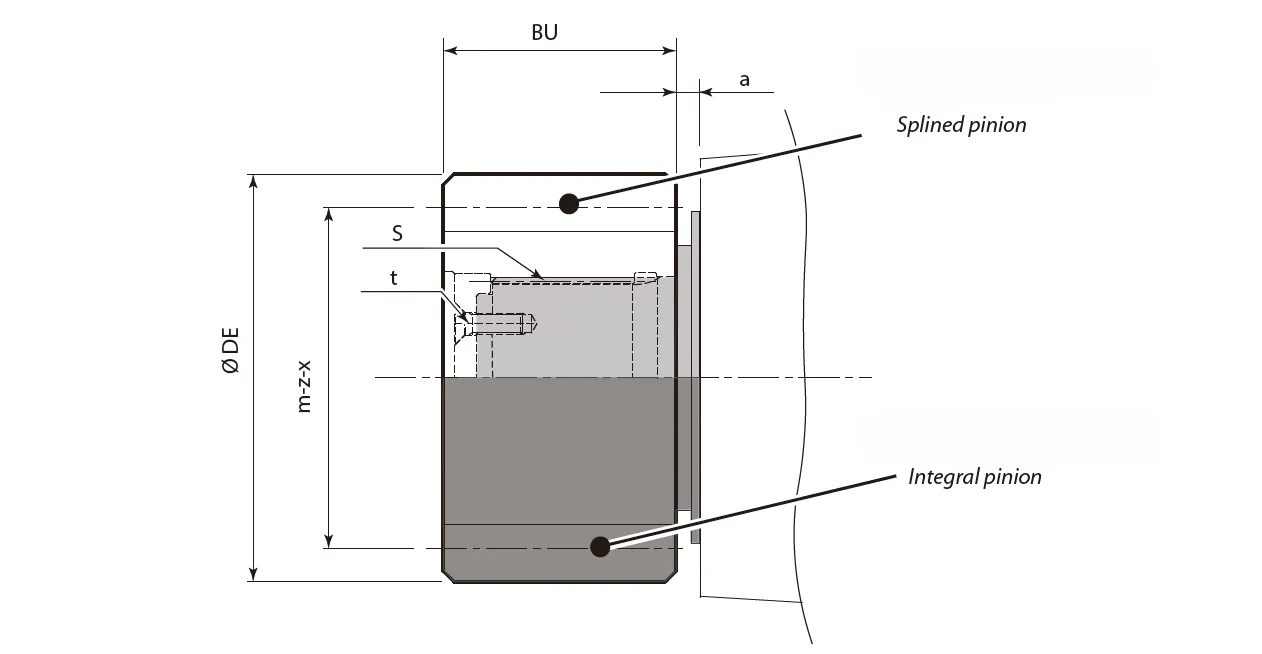
| Steun | M | z | X | ODE | BU | A | S | T | Tmax | |
| [mm] | Statisch [Nm] | Dynamisch [Nm] | ||||||||
| DBS DBS2 | 8 | 14 | 0 | 128 | 79.5 | 15 | DIN 5482 B70x64 | M10 (nr. 3) | 17500 | 15750 |
| 10 | 12 | 0.5 | 150 | 78 | 5 | - | - | 21500 | 19350 | |
| 10 | 13 | 0.5 | 160 | 85 | 19 | DIN 5482 B70x64 | M10 (nr. 3) | 21000 | 18900 | |
| 10 | 14 | 0.5 | 170 | 90 | 5 | - | - | 24000 | 21600 | |
| 12 | 10 | 0 | 144 | 100 | 5 | - | - | 18500 | 16650 | |
| 12 | 12 | 0.5 | 180 | 100 | 5 | DIN 5482 B70x64 | M10 (nr. 3) | 24000 | 21600 | |
| 12 | 14 | 0.5 | 204 | 105 | 5 | - | - | 24000 | 21600 | |
| 14 | 11 | 0.5 | 194.6 | 105 | 4 | - | - | 24000 | 21600 | |
| T18 | 8 | 20 | 0 | 176 | 115 | 15 | DIN 5482 B70x64 | M10 (nr. 3) | 14500 | 13050 |
| 10 | 11 | 0.681 | 141 | 85 | 6 | - | - | 12000 | 10800 | |
| 12 | 10 | 0.5 | 156 | 120 | 6 | - | - | 12000 | 10800 | |
| 12 | 11 | 0.525 | 168.61 | 110 | 6 | - | - | 13500 | 12150 | |
RE 810
Ondersteuning: Tecc
Ondersteuning: TRecc
Schacht:
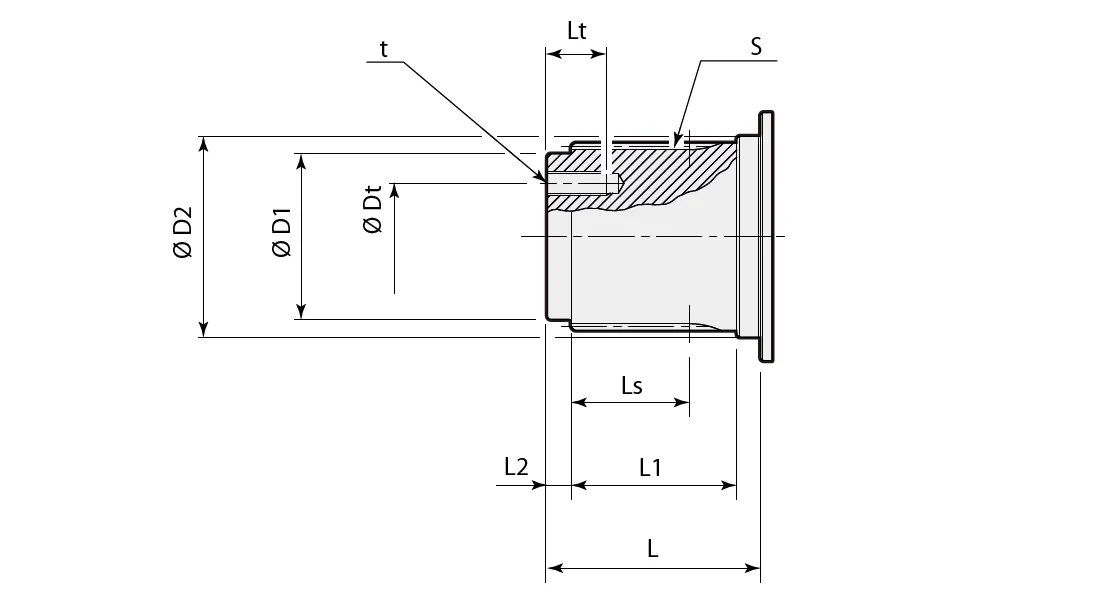
| Steun | ØD1 | ØD2 | S | Ls | L | L1 | L2 | T | ØDt | Luitenant |
| [ mm ] | ||||||||||
| Tecc | 62 f7 | 72 f7 | DIN5482 B70x64 | 51 | 90 | 70 | 10 | M10 (nr. 3) | 40 | 22 |
| TRecc | ||||||||||
Tandwielen:
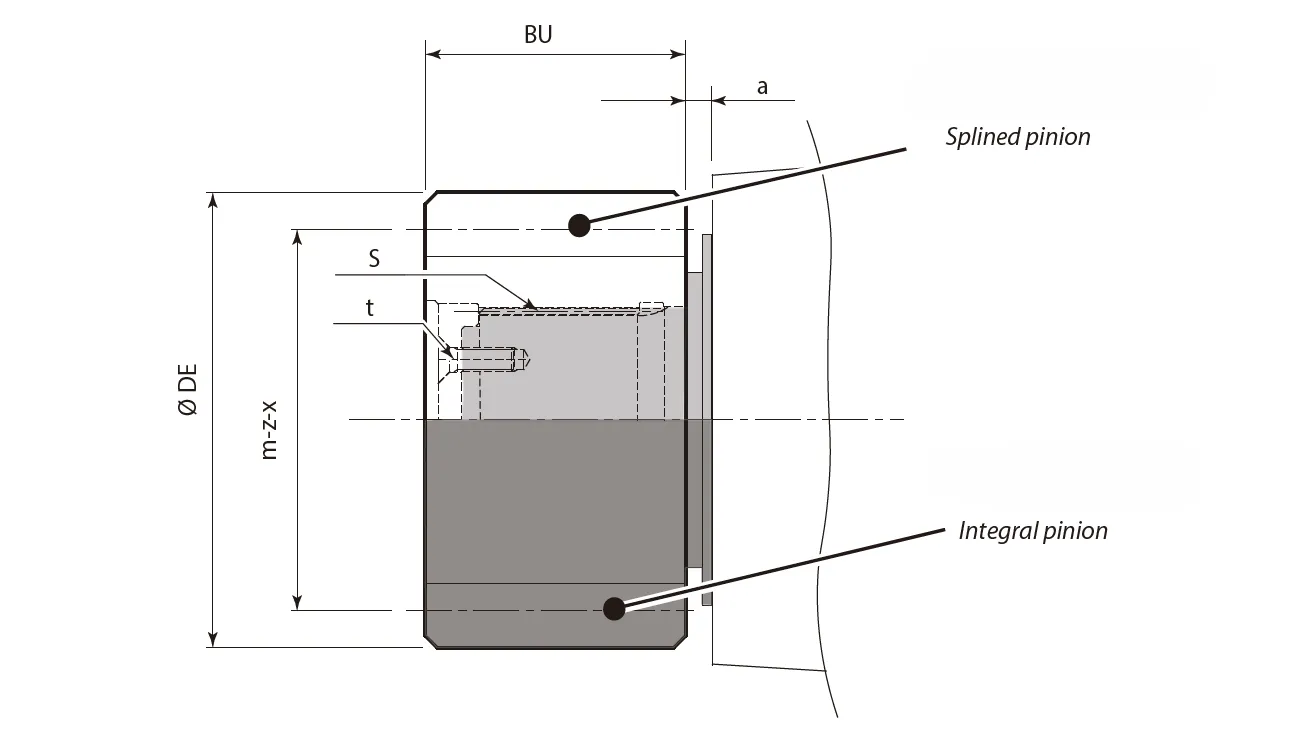
| Steun | M | z | X | ODE | BU | A | S | T | Tmax | |
| [mm] | Statisch [Nm] | Dynamisch [Nm] | ||||||||
| Tecc | 8 | 14 | 0 | 128 | 79.5 | 11.5 | DIN 5482 B70x64 | M10 (nr. 3) | 10500 | 9450 |
| 9 | 15 | 0 | 152.64 | 101 | 6.5 | - | - | 12500 | 11250 | |
| 10 | 14 | 0.5 | 169 | 90 | 1.5 | DIN 5482 B70x64 | M10 (nr. 3) | 14500 | 13050 | |
| 12 | 13 | 0.5 | 192 | 95 | 32.5 | 13500 | 12150 | |||
| 14 | 15 | 0.5 | 250.6 | 105 | 1.5 | 21000 | 18900 | |||
| TRecc | 8 | 15 | 0.3 | 140 | 80 | 13.5 | DIN 5482 B70x64 | M10 (nr. 3) | 15200 | 13680 |
| 10 | 13 | 0.5 | 160 | 90 | 5.5 | - | - | 17800 | 16020 | |
| 10 | 18 | 0 | 198 | 80 | 5.5 | - | - | 23800 | 21420 | |
| 12 | 12 | 0.5 | 180 | 100 | 3.5 | DIN 5482 B70x64 | M10 (nr. 3) | 19000 | 17100 | |
| 12 | 14 | 0.5 | 199 | 100 | 33.5 | 16000 | 14400 | |||
Voordelen van een planetaire zwenkaandrijving voor hoogwerkers
1. Hoog koppelvermogen voor zware lasten
Planetaire zwenkaandrijvingen zijn ontworpen om een uitzonderlijk hoog koppel te leveren, waardoor ze ideaal zijn voor het hanteren van de zware lasten die gepaard gaan met hoogwerkers. Hun meertraps planetaire tandwielsysteem zorgt voor een efficiënte koppelvermeerdering, wat een stabiele en veilige werking garandeert, zelfs bij het heffen of roteren van zware apparatuur zoals schaarhoogwerkers of giekarmen.
2. Compact en ruimtebesparend ontwerp
Het compacte ontwerp van planetaire zwenkaandrijvingen zorgt ervoor dat ze naadloos in hoogwerkers passen zonder overmatig veel ruimte in te nemen. Deze eigenschap is vooral waardevol in toepassingen waar ruimtegebrek een cruciale factor is, waardoor fabrikanten kleinere, efficiëntere machines kunnen bouwen zonder concessies te doen aan prestaties of stabiliteit.
3. Soepele 360-graden rotatie
Deze planetaire tandwielkasten met zwenkaandrijving maken een nauwkeurige en soepele rotatie van 360 graden mogelijk, wat essentieel is voor hoogwerkers om efficiënt te kunnen manoeuvreren in krappe of verhoogde ruimtes. De hoge precisie van het zwenklager en het planetaire tandwielsysteem zorgt voor minimale speling, waardoor operators de apparatuur nauwkeurig en gemakkelijk kunnen positioneren tijdens complexe taken.
4. Verbeterde duurzaamheid en langere levensduur
Planetaire zwenkoverbrengingen zijn vervaardigd uit robuuste materialen en ondergebracht in afgesloten behuizingen, waardoor ze bestand zijn tegen zware omgevingsomstandigheden zoals stof, vocht en extreme temperaturen. Deze duurzaamheid garandeert betrouwbaarheid op lange termijn, waardoor de onderhoudsbehoefte en stilstandtijd worden verminderd. Dit is cruciaal voor operators die werken in veeleisende bouw- of onderhoudsomgevingen.
5. Verbeterde veiligheid en stabiliteit
Door een consistente en betrouwbare rotatieregeling te bieden, verhogen planetaire zwenkaandrijvingen de algehele veiligheid van hoogwerkers. Hun vermogen om hoge axiale, radiale en kantelbelastingen te verwerken, zorgt ervoor dat het platform stabiel blijft tijdens gebruik, waardoor het risico op ongevallen wordt verminderd en de veiligheid van personeel op grote hoogte wordt gewaarborgd.
6. Energie-efficiëntie en kostenbesparing
Draaiende planetaire tandwielkasten zijn zeer energiezuinig dankzij hun effectieve koppelverdeling en minimale vermogensverliezen. Deze efficiëntie verlaagt niet alleen het energieverbruik, maar ook de operationele kosten op de lange termijn. Hun lange levensduur en minimale onderhoudsbehoeften dragen verder bij aan aanzienlijke kostenbesparingen voor gebruikers en bedrijven.


Toepassingen van planetaire zwenkaandrijvingen
1. Hoogwerkers (AWP's)
Planetaire zwenkaandrijvingen worden veel gebruikt in hoogwerkers zoals schaarhoogwerkers, giekhoogwerkers en heftrucks. Ze bieden een nauwkeurige rotatie van 360 graden en stabiele besturing, waardoor de verhoogde werkbakken of gieken veilig gepositioneerd kunnen worden tijdens bouw-, onderhouds- en inspectiewerkzaamheden, zelfs met zware lasten.
2. Kranen en hijsinstallaties
In kranen en hijsmachines bieden planetaire zwenkaandrijvingen een hoog koppel en een groot hefvermogen. Ze maken een soepele en gecontroleerde rotatie van kraanarmen of hijsplatformen mogelijk, waardoor een stabiele werking gegarandeerd is bij het manoeuvreren van zware materialen op bouwplaatsen, scheepswerven en in industriële omgevingen, zelfs onder uitdagende weersomstandigheden.
3. Zonvolgsystemen
Planetaire tandwielkasten zijn essentieel in zonvolgsystemen, waar ze de positie van zonnepanelen aanpassen aan de beweging van de zon. Hun nauwkeurige rotatiecontrole verbetert de energie-efficiëntie door de absorptie van zonne-energie te maximaliseren, terwijl hun duurzame ontwerp betrouwbare prestaties garandeert in buitenomgevingen met blootstelling aan stof, wind en vocht.
4. Graafmachines en zware machines
In graafmachines en andere zware bouwmachines maken deze planetaire tandwielkasten een efficiënte rotatie van gieken, bakken en andere hulpstukken mogelijk. Hun vermogen om hoge axiale, radiale en kantelkrachten te verwerken, garandeert een soepele werking, zelfs tijdens veeleisende taken zoals graven, tillen of materiaalverwerking in ruig terrein.
5. Windturbines
Draaiende planetaire tandwielkasten spelen een cruciale rol in windturbines, waar ze het giersysteem aansturen om de oriëntatie van de turbine aan te passen. Deze precieze positionering zorgt ervoor dat de turbinebladen naar de wind gericht zijn voor optimale energieopwekking. Hun robuuste constructie garandeert een lange levensduur, zelfs bij continu gebruik onder extreme weersomstandigheden.
 |  |
| Planetaire zwenkaandrijving voor rupskranen | Planetaire zwenkaandrijving voor graafmachines |
 | |
| Planetaire draaiaandrijving voor zonnevolgsystemen | Planetaire zwenkaandrijving voor windturbines |
Planetaire zwenkaandrijvingen versus planetaire wielaandrijvingen
Planetaire zwenkaandrijvingen en planetaire wielaandrijvingen Het zijn beide mechanische systemen die ontworpen zijn voor koppeloverdracht en nauwkeurige bewegingscontrole, maar ze verschillen aanzienlijk in structuur, functionaliteit en toepassingen.
Planetaire zwenkaandrijvingen
Planetaire zwenkaandrijvingen zijn compacte systemen die een planetair tandwielmechanisme combineren met een zwenklager. Ze zijn specifiek ontworpen voor rotatiebewegingen en 360-graden positionering. Deze aandrijvingen kunnen hoge axiale, radiale en kantelbelastingen aan, waardoor ze ideaal zijn voor zware toepassingen zoals hoogwerkers, kranen en zonvolgsystemen. De soepele rotatiecontrole van de zwenkaandrijving zorgt voor stabiliteit en precisie in toepassingen die nauwkeurige positionering vereisen. Bovendien beschermt de afgedichte behuizing tegen stof, vocht en extreme temperaturen, waardoor ze geschikt zijn voor ruwe buitenomgevingen. De primaire focus ligt op rotatiebeweging in plaats van lineaire of voorwaartse beweging.
Planetaire wielaandrijvingen
Aan de andere kant zijn planetaire wielaandrijvingen ontworpen om kracht over te brengen op wielen of rupsbanden, waardoor voorwaartse of achterwaartse beweging mogelijk is. Ze worden veel gebruikt in mobiele machines zoals graafmachines, laders en landbouwvoertuigen. Deze aandrijvingen beschikken over een planetair tandwielsysteem dat zorgt voor een hoge koppelvermeerdering, waardoor voertuigen soepel kunnen bewegen onder zware belasting of op ruw terrein. In tegenstelling tot zwenkaandrijvingen zijn wielaandrijvingen geoptimaliseerd voor tractie, mobiliteit en snelheidsregeling in plaats van rotatiepositionering.
Belangrijkste verschillen
- BewegingstypeZwenkaandrijvingen zijn gericht op rotatiebeweging, terwijl wielaandrijvingen zijn ontworpen voor voorwaartse/achterwaartse beweging.
- LadingbehandelingZwenkaandrijvingen verwerken axiale en radiale belastingen, terwijl wielaandrijvingen de grip op de grond verzorgen.
- ToepassingenZwenkaandrijvingen worden gebruikt in kranen, hoogwerkers en windturbines, terwijl wielaandrijvingen te vinden zijn in bouw- en landbouwvoertuigen.
 |  |
| Planetaire zwenkaandrijvingen | Planetaire wielaandrijvingen |
Extra informatie
| Bewerkt door | Yjx |
|---|
























