
トウモロコシ播種機用遊星輪駆動ギアボックス
トウモロコシ播種機用の遊星歯車式ホイール駆動ギアボックスは、トルク増幅と減速のために設計された高度な遊星歯車システムであり、農業機械の効率的な推進を可能にします。トウモロコシ播種機では、ホイール駆動式遊星歯車式ギアボックスは通常、ホイールハブに取り付けられ、油圧または機械式動力源から動力を伝達して、正確な速度制御と不整地での優れた牽引力を実現します。これにより、土壌条件の変化や積載重量の増大に関わらず、一定の条間隔と深さを維持することで、正確な播種が可能となり、作物の収量と作業効率を最適化します。
トウモロコシ播種機用の遊星歯車式ギアボックスは、トルク増幅と減速を目的とした高度な遊星歯車機構であり、農業機械の効率的な推進を実現します。このギアボックスは、入力動力を受け取る中央の太陽歯車、太陽歯車の周りを公転しながら外側のリングギアと噛み合う複数の遊星歯車、そして増幅されたトルクを出力軸またはホイールハブに直接伝達する遊星キャリアで構成されています。ベアリングが回転要素を支えて摩擦を最小限に抑え、堅牢なハウジングとシールが環境汚染物質から保護することで、過酷な圃場環境下でも長寿命を保証します。
トウモロコシ播種機では、ホイール駆動式の遊星歯車減速機は通常、ホイールハブに取り付けられ、油圧または機械式動力源から動力を伝達することで、精密な速度制御と不整地での優れた牽引力を実現します。これにより、土壌条件の変化や積載重量の増大といった状況下でも、一定の条間隔と播種深度を維持できるため、正確な播種が可能となり、作物の収量と作業効率の最適化につながります。
遊星歯車駆動の寸法
技術的な定義
| シンボル | 測定単位 | 説明 |
| 私 | - | 削減率 |
| T2max | [ナノメートル] | 最大出力トルク |
| T2p | [ナノメートル] | 最大出力トルク |
| T2maxint | [ナノメートル] | 最大断続トルク |
| T2cont | [ナノメートル] | 連続出力トルク |
| 続き | [kW] | 最大連続電力 |
| パイント | [kW] | 最大断続電力 |
| n1max | [rpm] | 最大入力速度 |
| n2max | [rpm] | 最大出力速度 |
GR 80
| タイプ | モーター出力 [cc] | 総排出量 [cc] | 私 | トルク | スピード n2max | 力 | |||||||
| T2cont | T2maxint | T2p | 続き [kW] | パイント [kW] | |||||||||
| [ナノメートル] | Δp [バー] | [ナノメートル] | Δp [バー] | [ナノメートル] | Δp [バー] | [rpm] | ポルタタ 流れ [リットル/分] | ||||||
| GR80-MR50 | 51,6 | 269,9 | 5,23 | 470 | 145 | 570 | 175 | 630 | 205 | 115 | 30 | 5,5 | 7 |
| GR80-MR80 | 80,3 | 420,0 | 800 | 145 | 960 | 175 | 1060 | 205 | 68 | 30 | 5,5 | 7 | |
| GR80-MR100 | 99,8 | 522,0 | 800 | 115 | 1000 | 145 | 1310 | 205 | 55 | 30 | 5,5 | 7 | |
| GR80-MR125 | 125,7 | 657,4 | 800 | 95 | 1000 | 120 | 1500 | 190 | 45 | 30 | 5,5 | 7 | |
| GR80-MR160 | 159,6 | 834,7 | 800 | 75 | 1000 | 95 | 1500 | 145 | 33 | 30 | 5 | 7 | |
| GR80-MR200 | 199,8 | 1045,0 | 800 | 60 | 1000 | 75 | 1500 | 115 | 26 | 30 | 5 | 7 | |
| GR80-MR250 | 249,3 | 1303,8 | 800 | 50 | 1000 | 60 | 1500 | 95 | 21 | 30 | 4,5 | 6 | |
GR 200
| タイプ | モーター出力 [cc] | 総排出量 [cc] | 私 | トルク | スピード n2最大 | 力 | |||||||
| T2続き | T2最大整数 | T2p | 続き [kW] | パイント [kW] | |||||||||
| [ナノメートル] | Δp [バー] | [ナノメートル] | Δp [バー] | [ナノメートル] | Δp [バー] | [rpm] | ポルタタ 流れ [リットル/分] | ||||||
| GR200-MR50 | 51,6 | 319,9 | 6,20 | 560 | 145 | 670 | 175 | 740 | 205 | 98 | 30 | 5,5 | 7 |
| GR200-MR80 | 80,3 | 497,9 | 950 | 145 | 1150 | 175 | 1250 | 205 | 58 | 30 | 5,5 | 7 | |
| GR200-MR100 | 99,8 | 618,8 | 1180 | 145 | 1420 | 175 | 1560 | 205 | 46 | 30 | 5,5 | 7 | |
| GR200-MR125 | 125,7 | 779,3 | 1450 | 145 | 1750 | 175 | 1920 | 205 | 38 | 30 | 5,5 | 7 | |
| GR200-MR160 | 159,6 | 989,5 | 1600 | 125 | 2100 | 165 | 2450 | 205 | 29 | 30 | 5 | 7 | |
| GR200-MR200 | 199,8 | 1238,8 | 1600 | 100 | 2150 | 135 | 2500 | 165 | 23 | 30 | 5 | 7 | |
| GR200-MR250 | 249,3 | 1545,7 | 1600 | 80 | 2150 | 105 | 2500 | 135 | 18 | 30 | 4,5 | 6 | |
| GR200-MR315 | 315,7 | 1957,3 | 1600 | 65 | 2150 | 85 | 2500 | 110 | 15 | 30 | 4 | 5 | |
| GR200-MR375 | 372,6 | 2310,1 | 1600 | 55 | 2150 | 70 | 2500 | 90 | 12 | 30 | 3,5 | 4,5 | |
EH 210
| タイプ | 重さ | 油の量 | i (da÷a / From÷to) | T2max [ナノメートル] | n1max [rpm] | ||||
| EH 212 | EH 213 | EH 212 | EH 213 | EH 212 | EH 213 | ||||
| EH 210 S | 35 | 40 | 0.8 | 1 | 11 ÷ 29 | 41 ÷ 129 | 3950 | 3500 | |
| EH 210 SC | |||||||||
| EH 210 PD | - | - | |||||||
EH 240
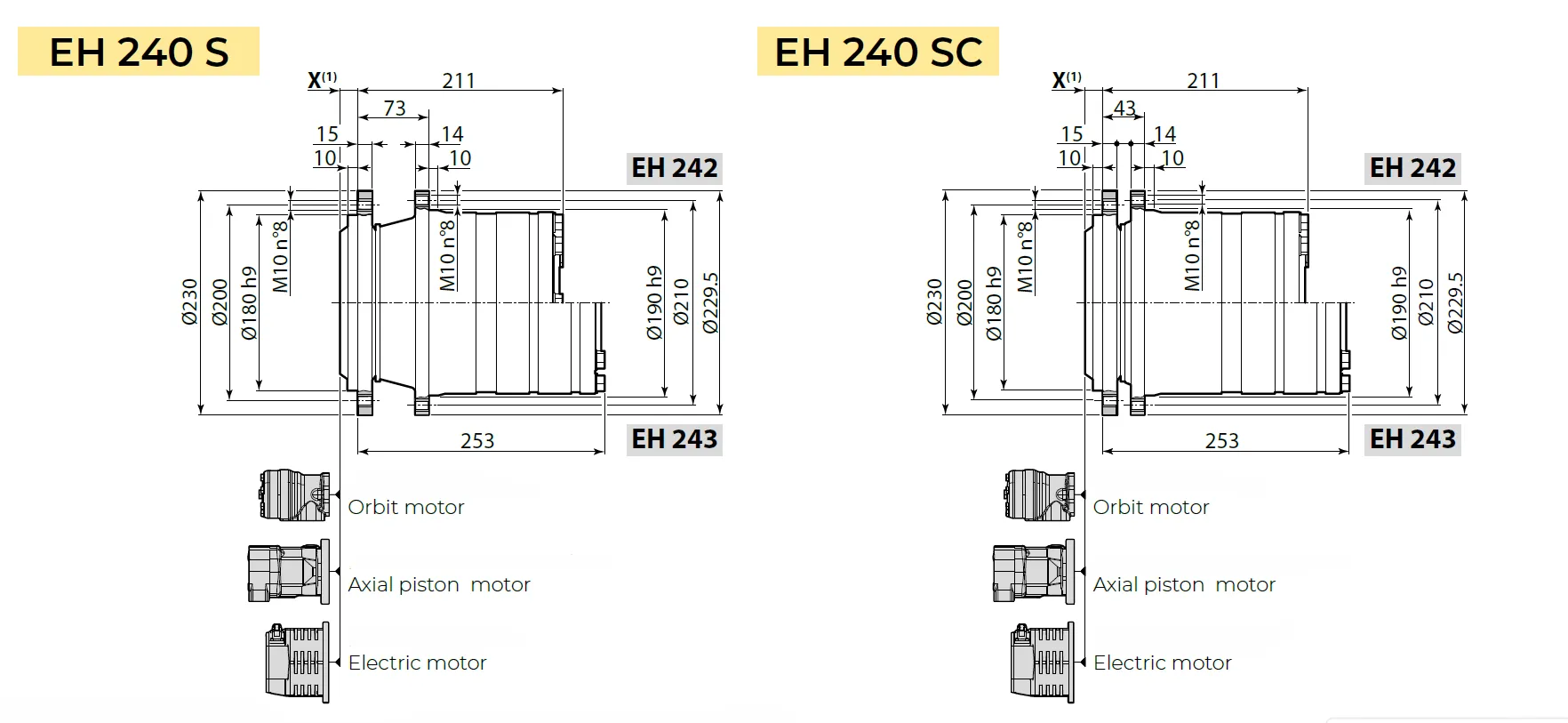
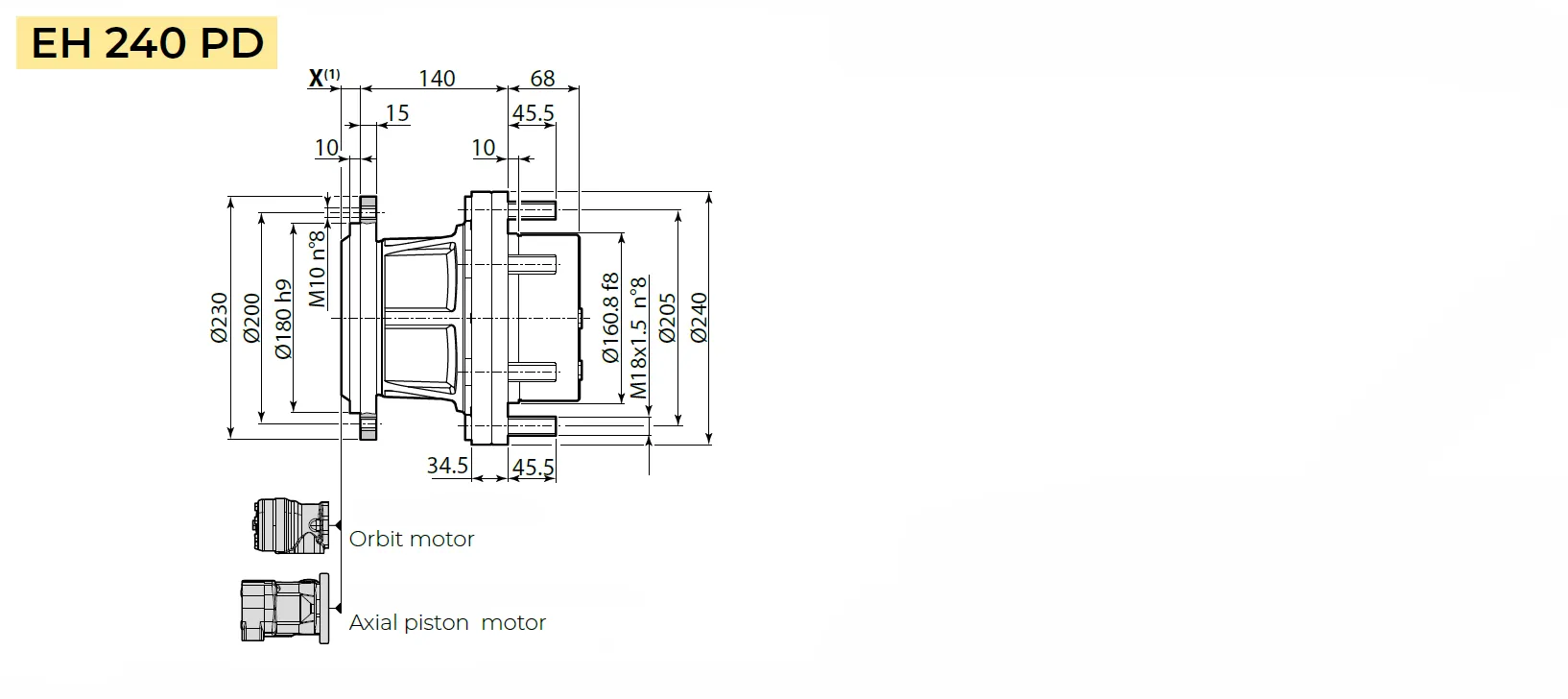
| タイプ | 重さ | 油の量 | i (da÷a / From÷to) | T2max [ナノメートル] | n1max [rpm] | ||||
| EH 242 | EH 243 | EH 242 | EH 243 | EH 242 | EH 243 | ||||
| EH 240 S | 35 | 40 | 0.8 | 1 | 12 ÷ 31 | 45 ÷ 135 | 5600 | 3500 | |
| EH 240 SC | |||||||||
| EH 240 PD | - | - | |||||||
EH 350
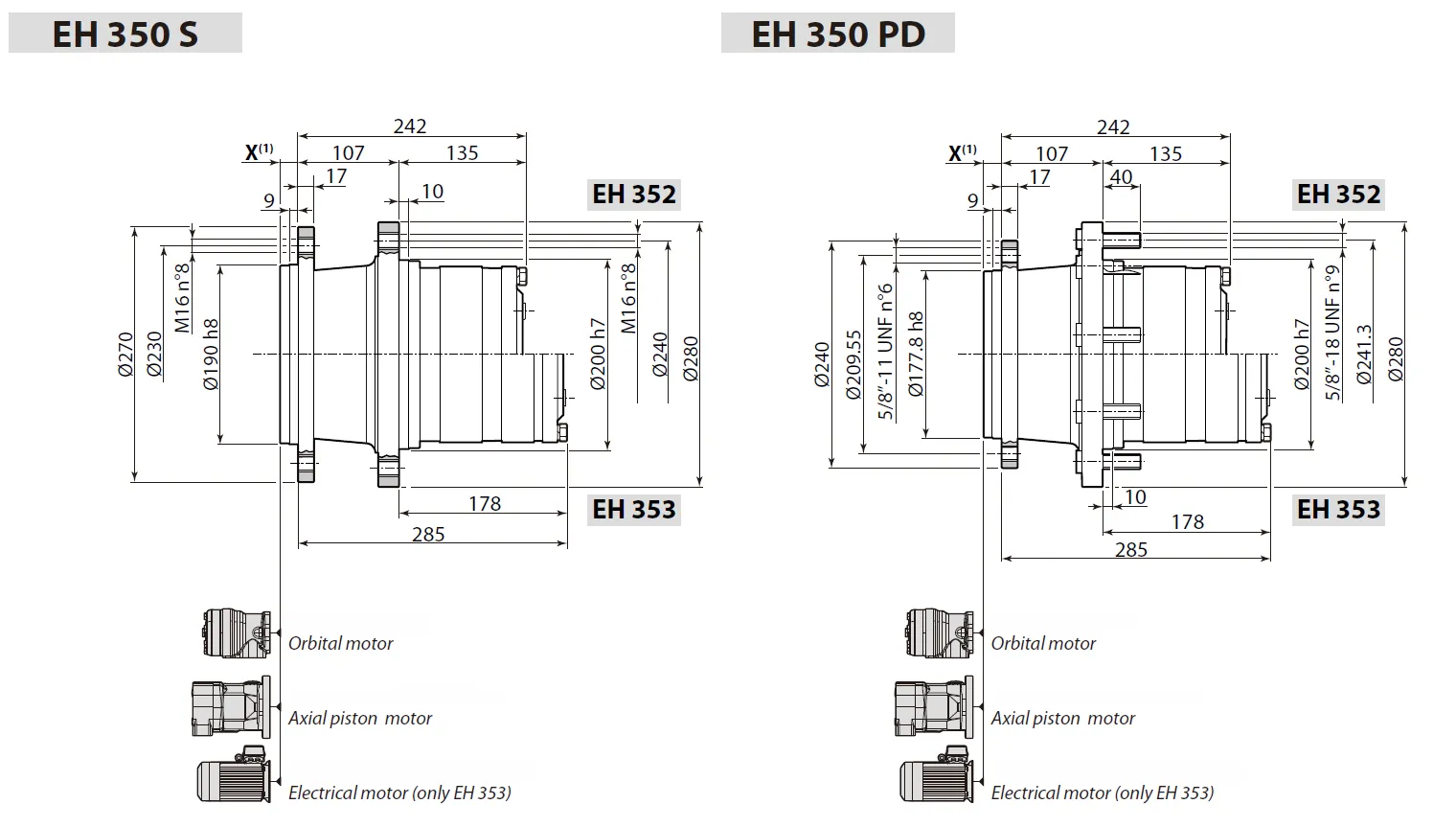
| タイプ | 重さ | 油の量 | i (da÷a / From÷to) | T2max [ナノメートル] | n1max [rpm] | ||||
| EH 352 | EH 353 | EH 352 | EH 353 | EH 352 | EH 353 | ||||
| EH 350 S | 55 | 60 | 1 | 1.2 | 15 ÷ 31 | 52 ÷ 135 | 7200 | 3500 | |
| EH 350 PD | |||||||||
EH 610
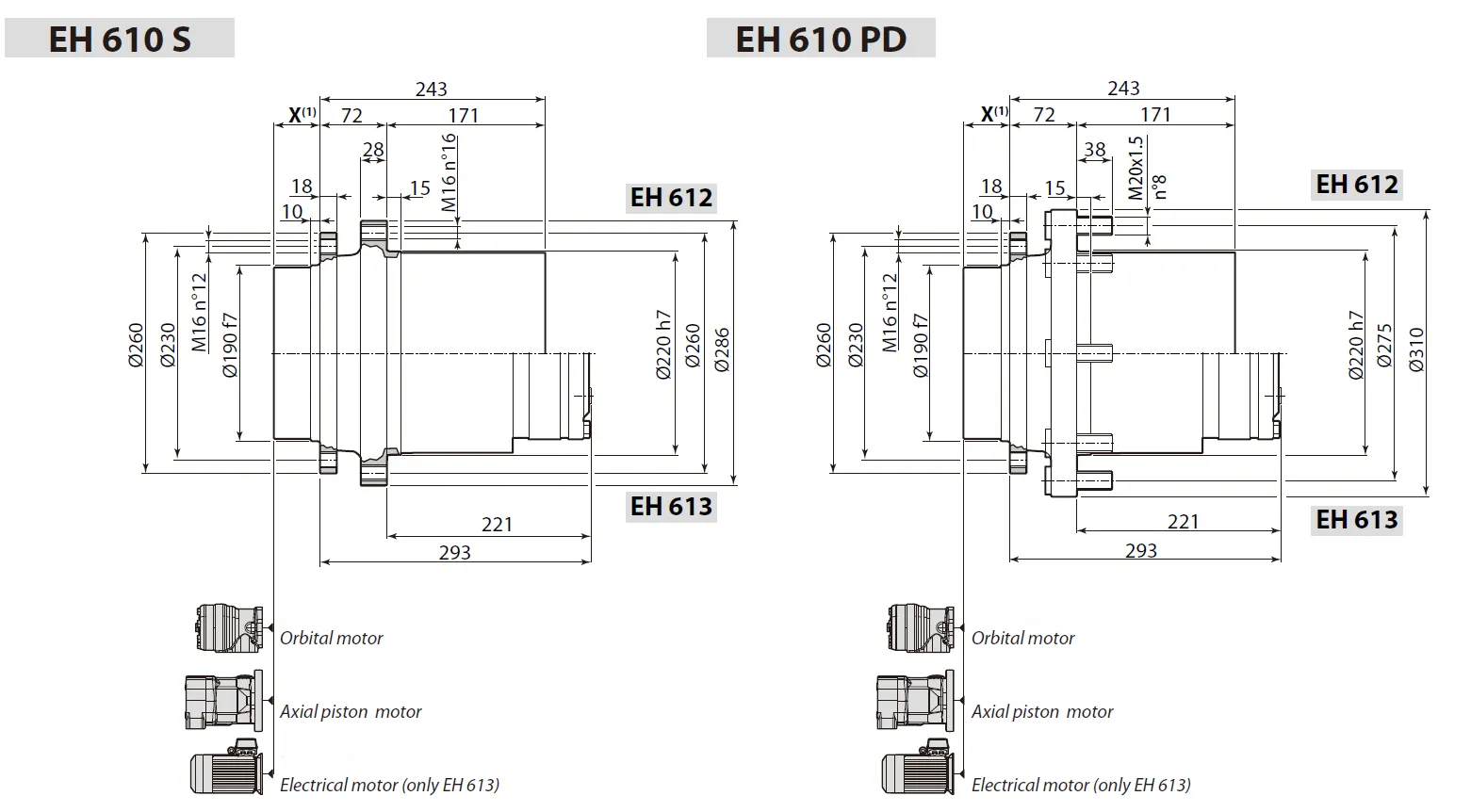
| タイプ | 重さ | 油の量 | i (da÷a / From÷to) | T2max [ナノメートル] | n1max [rpm] | ||||
| EH 612 | EH 613 | EH 612 | EH 613 | EH 612 | EH 613 | ||||
| EH 610 S | 60 | 70 | 1.2 | 1.5 | 12 ÷ 31 | 47 ÷ 138 | 13500 | 3500 | |
| EH 610 PD | |||||||||
EH 910
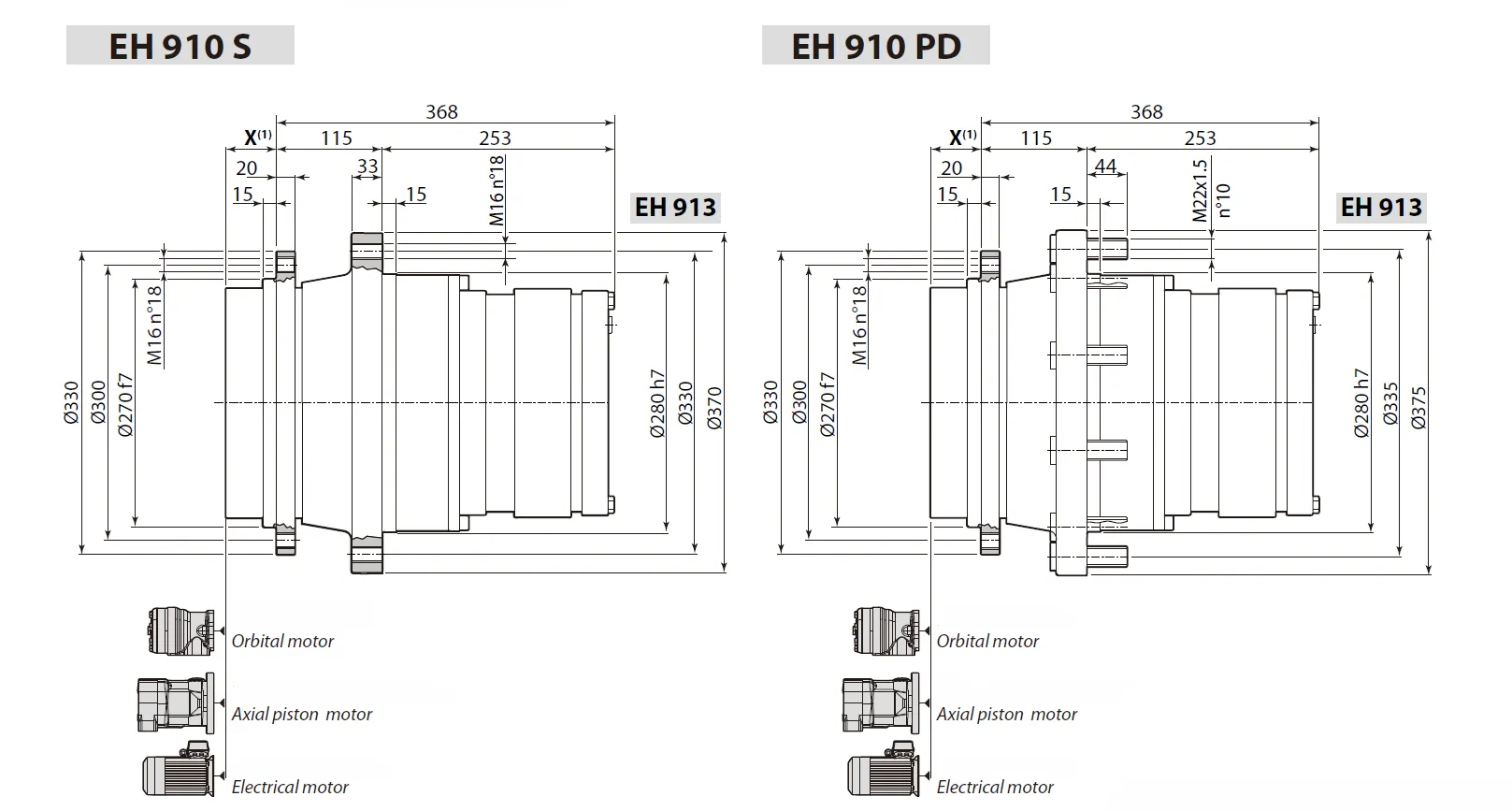
| タイプ | 重さ | 油の量 | i (da÷a / From÷to) | T2max | n1max | |
| EH 913 | EH 913 | EH 913 | [ナノメートル] | [rpm] | ||
| EH 910 S | 130 | 1 | 47 ÷ 131 | 24200 | 3500 | |
| EH 910 PD | ||||||
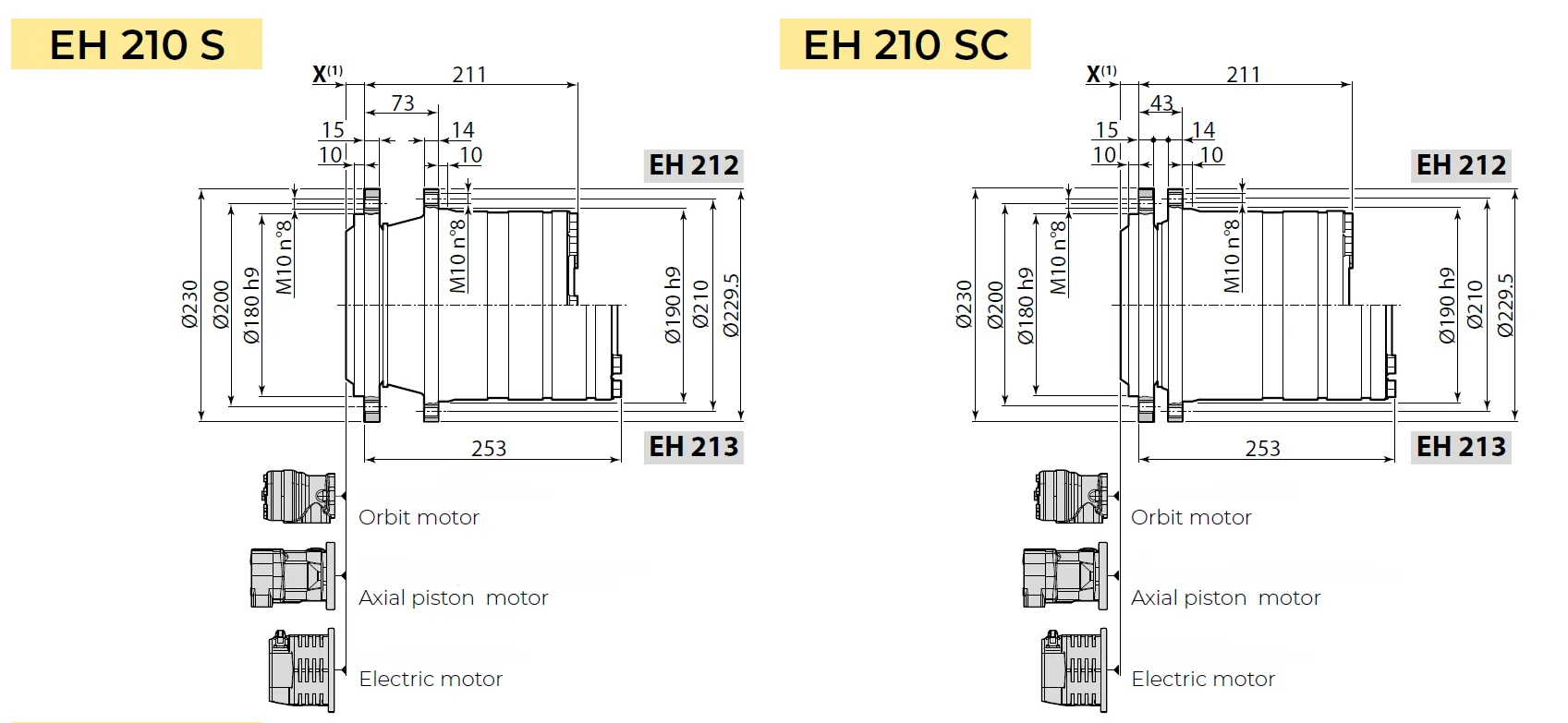
Sバージョン

| サイズ | 寸法 | ||||||||||
| D1 | D2 | D3 | D4 | D5 | D6 | D7 | D8 | L1 | L2 | L3 | |
| EH 210 S | 230 | 200 | 180 h9 | 190 h9 | 210 | 229.5 | M10 No.8 | M10 No.8 | 253 | 73 | 180 |
| EH 240 S | 230 | 200 | 180 h9 | 190 h9 | 210 | 229.5 | M10 No.8 | M10 No.8 | 253 | 73 | 180 |
| EH 350 S | 270 | 230 | 190 h8 | 200 h7 | 240 | 280 | M16 No.8 | M16 No.8 | 242 | 107 | 178 |
| EH 610 S | 260 | 230 | 190 f7 | 220 h7 | 260 | 286 | M16 12番 | M16号16番 | 243 | 72 | 171 |
| EH 910 S | 330 | 300 | 270 f7 | 280 h7 | 350 | 370 | M16号線18番 | M16号線18番 | 368 | 115 | 253 |
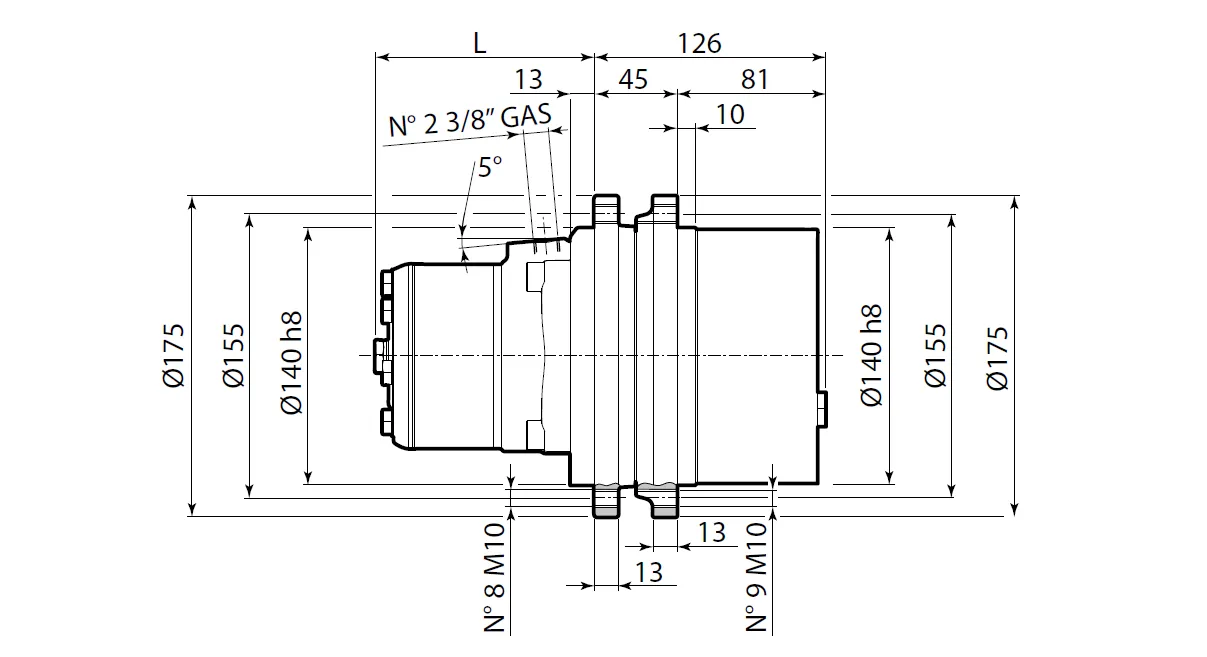
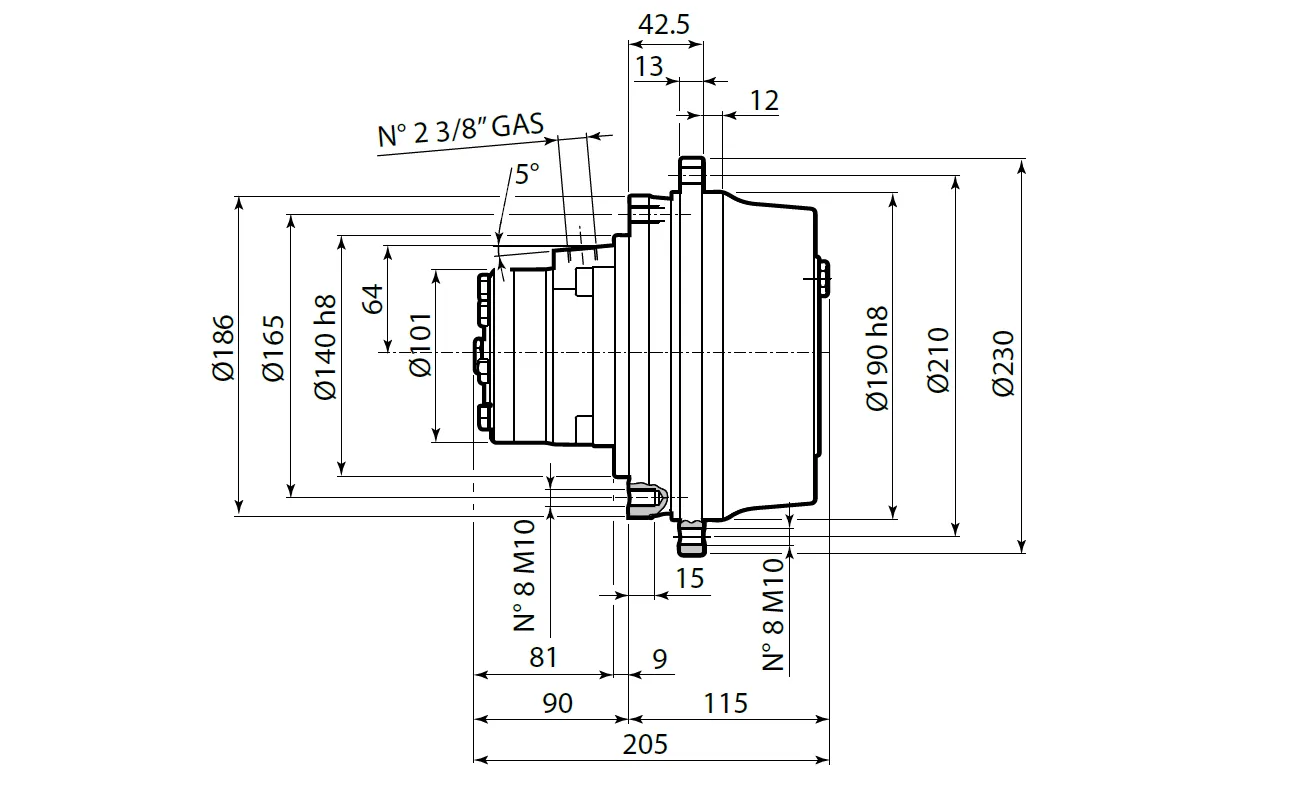
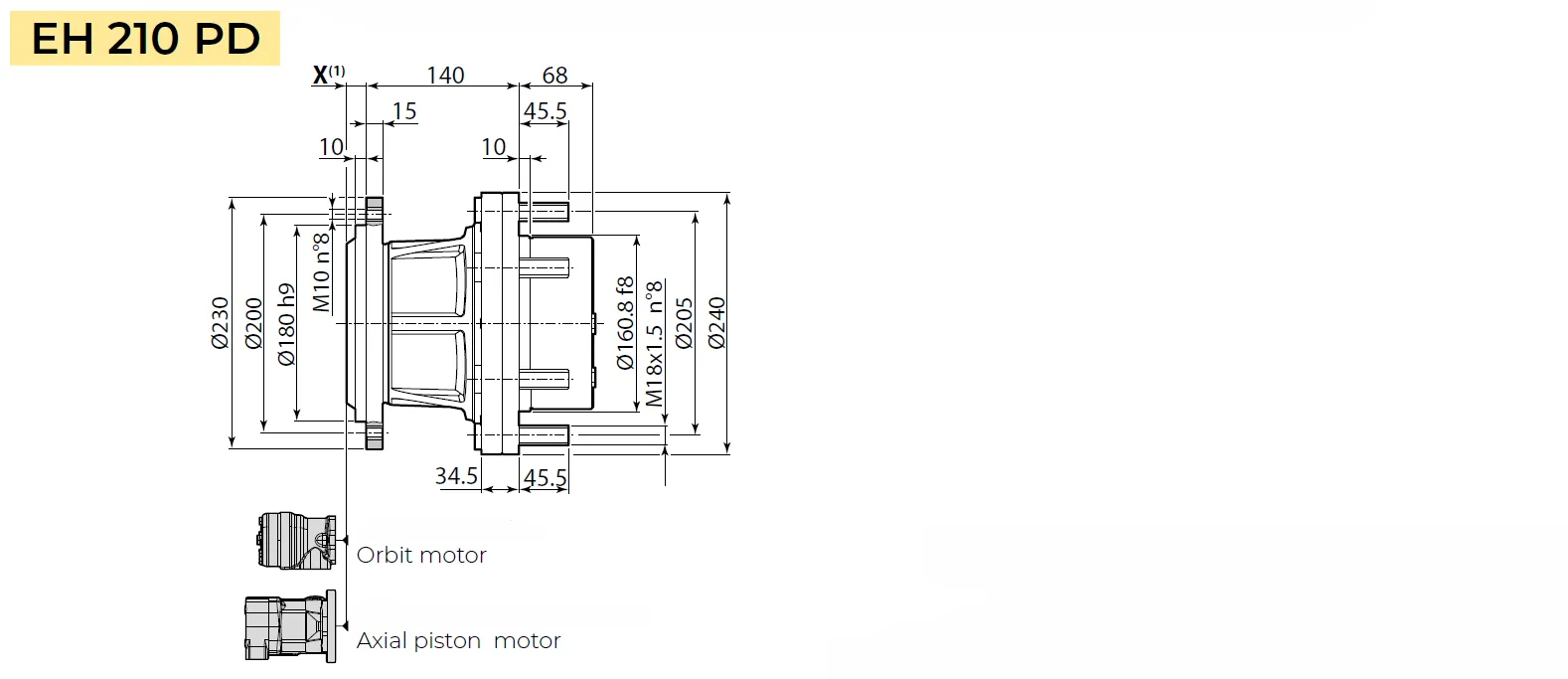
PD版
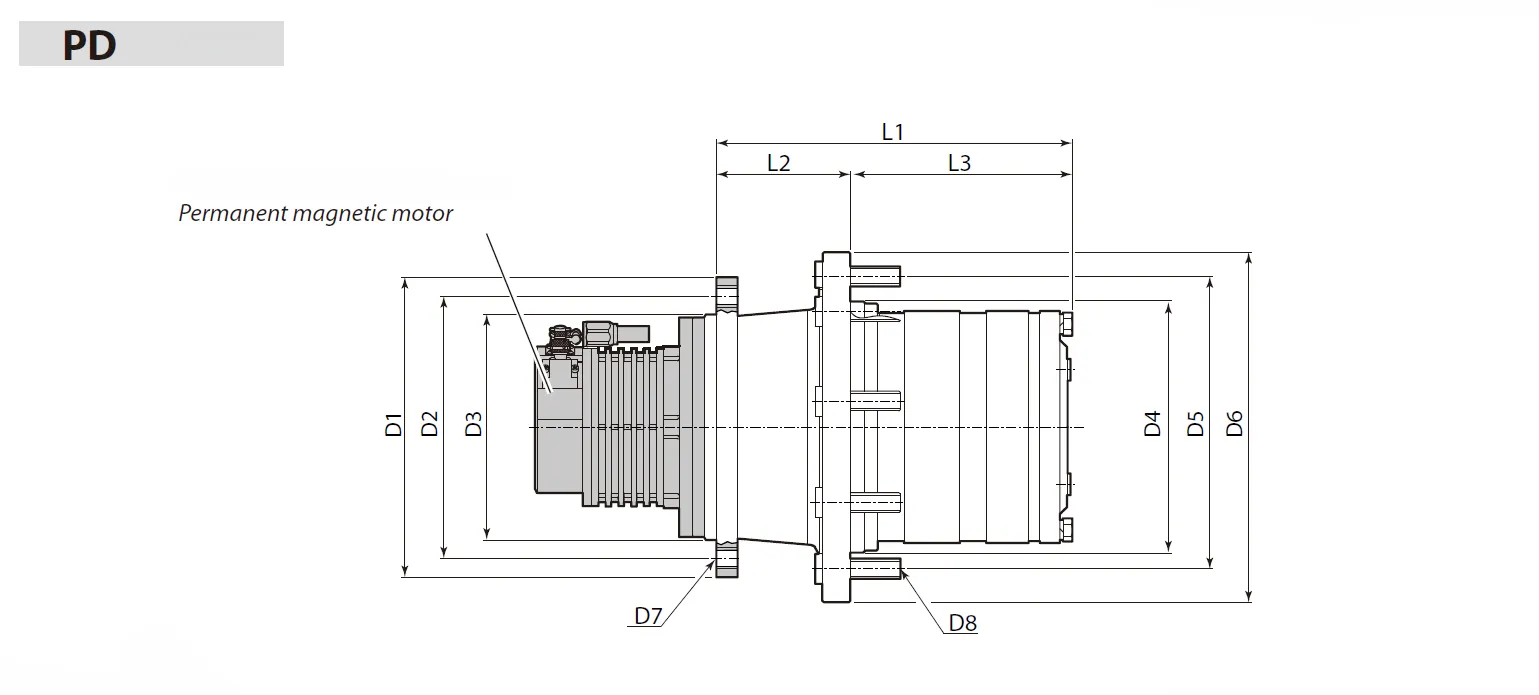
| サイズ | 寸法 | ||||||||||
| D1 | D2 | D3 | D4 | D5 | D6 | D7 | D8 | L1 | L2 | L3 | |
| EH 210 PD | 230 | 200 | 180 h9 | 160.8 f8 | 205 | 240 | M10(8倍) | M18x1.5 (6個) | 210 | 140 | 70 |
| EH 240 PD | 230 | 200 | 180 h9 | 160.8 f8 | 205 | 240 | M10(8倍) | M18x1.5 (6個) | 210 | 140 | 70 |
| EH 350 PD | 240 | 209.55 | 177.8 h8 | 200 h7 | 241.3 | 280 | 5/8"-11 UNC (6個) | 5/8"-19 UNF (9個) | 285 | 107 | 178 |
| EH 610 PD | 260 | 230 | 190 f7 | 220 h7 | 275 | 310 | M16(12倍) | M20x1.5 (8個) | 293 | 72 | 221 |
| EH 910 PD | 330 | 300 | 270 f7 | 280 h7 | 335 | 375 | M16(18倍) | M22x1.5 (10個) | 368 | 115 | 253 |
トウモロコシ播種機のホイール駆動式遊星歯車機構の利点
- 優れたトルク増幅
この遊星歯車式ギアボックス設計は、太陽歯車、遊星歯車、およびリング歯車の相互作用により高トルク出力を実現することに優れており、トウモロコシ播種機が重い荷物を積んで困難な地形を走行する際にも安定した車輪推進力を維持し、滑りを低減して、さまざまな土壌条件において均一な種子散布を確保することで、最適な作物生育を実現します。 - コンパクトで軽量な構造
複数のギアを同軸配置で統合することにより、遊星歯車機構は省スペース設計を実現し、トウモロコシ播種機の総重量を最小限に抑えます。これにより、狭い圃場での操作性が向上し、土壌の圧縮が軽減されます。結果として、動力伝達を損なうことなく、土壌の健康を維持し、持続可能な農業慣行を支援します。 - 耐久性と寿命の向上
複数の遊星歯車に負荷が均等に分散されることで、個々の部品の摩耗が軽減され、ホイール駆動ギアボックスは播種作業中に発生する衝撃や振動に対して高い耐性を持ち、その結果、耐用年数が延長され、メンテナンスコストが削減され、過酷な農業環境においてもシーズンを通して信頼性の高い性能が確保されます。 - 高い運用効率
95%を超える効率を誇るこの遊星歯車駆動装置は、駆動源から車輪への動力伝達時のエネルギー損失を最小限に抑え、トウモロコシ播種機の燃料消費量と運用コストを削減するとともに、大規模農業活動における排出量を削減することで環境の持続可能性に貢献します。 - 正確な速度と制御
遊星歯車機構は、柔軟な減速比を提供することで、正確な速度調整を可能にします。これは、トウモロコシ播種機の種子計量システムと車輪の動きを同期させるために不可欠であり、その結果、正確な条間隔、播種深度制御、および播種密度が得られ、播種精度の向上により収量ポテンシャルを高め、種子の無駄を最小限に抑えます。 - スムーズで静かな操作
遊星歯車機構は、バランスの取れた歯車のかみ合いと負荷分散により、振動がなく低騒音の性能を実現します。これにより、長時間の播種作業中の作業者の快適性が向上するだけでなく、トウモロコシ播種機全体の機械的ストレスも軽減され、過酷な圃場での使用においてもシステム全体の安定性と耐久性が向上します。

遊星歯車式ギアボックスの用途
- 農業機械
トウモロコシ播種機、トラクター、飼料混合機などの農業機械において、遊星歯車式ギアボックスは強力なトルク増幅と減速を実現し、不整地での効率的な走行を可能にすると同時に土壌の圧縮を最小限に抑え、播種や収穫などの作業における精密な制御を保証します。これにより、過酷な農業環境における生産性の向上と稼働停止時間の短縮につながります。 - 建設機械
掘削機、ホイールローダー、コンパクトトラックローダーなどに採用されているこれらの遊星歯車式ホイール駆動装置は、ホイール駆動とトラック駆動に高いトルク密度を提供し、過酷な建設現場で優れた牽引力と操縦性を実現します。また、重荷重や衝撃にも耐え、掘削、吊り上げ、資材運搬などの作業を最小限のメンテナンスでサポートします。 - 鉱業および採石業
鉱山車両、カッターヘッド、履帯式機械などに採用されているこれらの遊星歯車減速機は、過酷な条件下でも信頼性の高い動力伝達を保証し、掘削、運搬、採掘に必要なトルクを提供するとともに、粉塵、振動、強い衝撃に耐え、厳しい地下や露天掘りの環境下でも継続的な生産性を維持します。 - 林業および土地管理機器
収穫機、フォワーダー、マルチング機などの林業機械では、ホイール駆動式の遊星歯車機構により、森林地帯での強力なホイール推進力と安定性が確保され、木材の効率的な取り扱いと土地の開墾が可能になるとともに、瓦礫や不均一な路面に対する耐久性が向上し、遠隔地の森林地帯における持続可能な作業慣行と作業安全性が促進されます。 - 自動搬送車(AGV)
倉庫およびイントラロジスティクスシステムにおいて、ホイール駆動式遊星歯車減速機はAGV(無人搬送車)のハブ駆動装置として機能し、コンパクトな統合性と高いラジアル荷重容量を提供することで、狭い空間での正確かつ自律的なナビゲーションを可能にし、それによってマテリアルハンドリング効率の最適化、人件費の削減、そして最新の自動化施設におけるシームレスな運用をサポートします。
 |  |
| ブームスプレーヤ用遊星輪駆動 | モーターグレーダー用遊星輪駆動 |
 |  |
| 地下掘削ジャンボ用遊星輪駆動 | テレハンドラー用遊星輪駆動 |
トウモロコシ播種機の遊星歯車駆動装置の取り付け手順
- 作業場所を準備し、道具を揃える
まず、ギアボックス部品の汚染を防ぐため、清潔で水平な作業スペースを選び、トルクレンチ、ソケットセット、吊り上げ装置、手袋や保護メガネなどの安全装備といった必要な工具を準備します。同時に、マニュアルを参照して具体的なトルク仕様や互換性チェックを確認し、圃場作業における播種機の効率を損なう可能性のある設置ミスを回避してください。 - トウモロコシ播種機を固定して高さを上げる
適切なジャッキまたはホイストを使用してトウモロコシ播種機を安全に持ち上げ、ホイールハブ部分にアクセスします。その際、すべての支持部が安定していること、および機械の電源がオフになっており、油圧ラインの圧力が抜けていることを確認してください。これにより、分解中のリスクが最小限に抑えられ、遊星歯車減速機の交換作業に進む前に、取り付け箇所の摩耗や損傷を徹底的に検査することができます。 - 既存のギアボックスアセンブリを取り外します
古い遊星歯車装置から接続されている駆動軸、油圧ライン、または電気配線をすべて外し、歪みを防ぐために取り付けボルトを順番に緩めて取り外し、ユニットの向きをメモしながら慎重に取り外します。これにより、スムーズな移行が可能になり、植え付けシーズン中の潜在的なダウンタイムを削減できます。 - 取り付け面を点検し、清掃する
ホイールハブおよび周辺部品に異物、腐食、または異常がないか徹底的に点検し、適切な溶剤で洗浄し、推奨されている場合は焼き付き防止剤を塗布してください。これにより、適切な位置合わせと密閉が確保され、過酷な農業条件下でも新しいホイール駆動ギアボックスの寿命が延びます。 - 新しいギアボックスを取り付けて位置合わせする
新しい遊星歯車式ホイール駆動ギアボックスをホイールハブに取り付け、入力軸と出力軸を播種機の駆動システムに正確に位置合わせします。次に、指定されたボルトを推奨トルク値で十字型に締め付けて固定し、負荷を均等に分散させ、信頼性の高いトルク伝達を促進し、トウモロコシの播種作業中の振動を最小限に抑えます。 - 機能のテストと検証
すべての駆動部品を再接続し、ガイドラインに従って遊星歯車減速機に潤滑油を塗布し、車輪を手動で回転させるか、低速で駆動システムを作動させて異音や漏れがないか監視することで予備的な動作テストを実施します。その後、圃場での試験を行い、正確な速度制御と牽引力を確認し、最終的に種子配置の精度と作物の収量ポテンシャルを最適化します。

追加情報
| 編集者 | Yjx |
|---|
























