
Planetenradgetriebe für Teleskoparbeitsbühnen
Das Planetenradgetriebe für Teleskoparbeitsbühnen ist ein kompaktes, leistungsstarkes Planetengetriebe. In Teleskoparbeitsbühnen werden diese Planetengetriebe hauptsächlich in Rad- oder Kettenantriebe integriert, um einen stabilen Vortrieb auf unebenem Gelände, an Hängen und in beengten Räumen zu gewährleisten. Sie kommen auch in Schwenkantrieben zum Einsatz, um die Drehrichtung der Arbeitsbühne präzise zu steuern und so eine genaue Positionierung bei Arbeiten in großer Höhe wie Wartung, Bau oder Inspektion zu ermöglichen.
Das Planetenradgetriebe für Teleskoparbeitsbühnen ist ein kompaktes, leistungsstarkes Planetengetriebe mit einem zentralen Sonnenrad, mehreren Planetenrädern und einem äußeren Hohlrad. Es ist für eine erhebliche Drehmomentverstärkung und Drehzahlreduzierung ausgelegt und gewährleistet gleichzeitig Effizienz und Langlebigkeit auch unter anspruchsvollen Bedingungen. In Teleskoparbeitsbühnen werden diese Planetengetriebe hauptsächlich in Rad- oder Kettenantriebe integriert, um einen stabilen Vortrieb auf unebenem Gelände, an Hängen und in beengten Räumen zu ermöglichen. Sie kommen auch in Schwenkantrieben zum Einsatz, die eine präzise Drehsteuerung der Auslegerplattform ermöglichen und so eine genaue Positionierung bei Arbeiten in großer Höhe wie Wartung, Bau oder Inspektion gewährleisten.
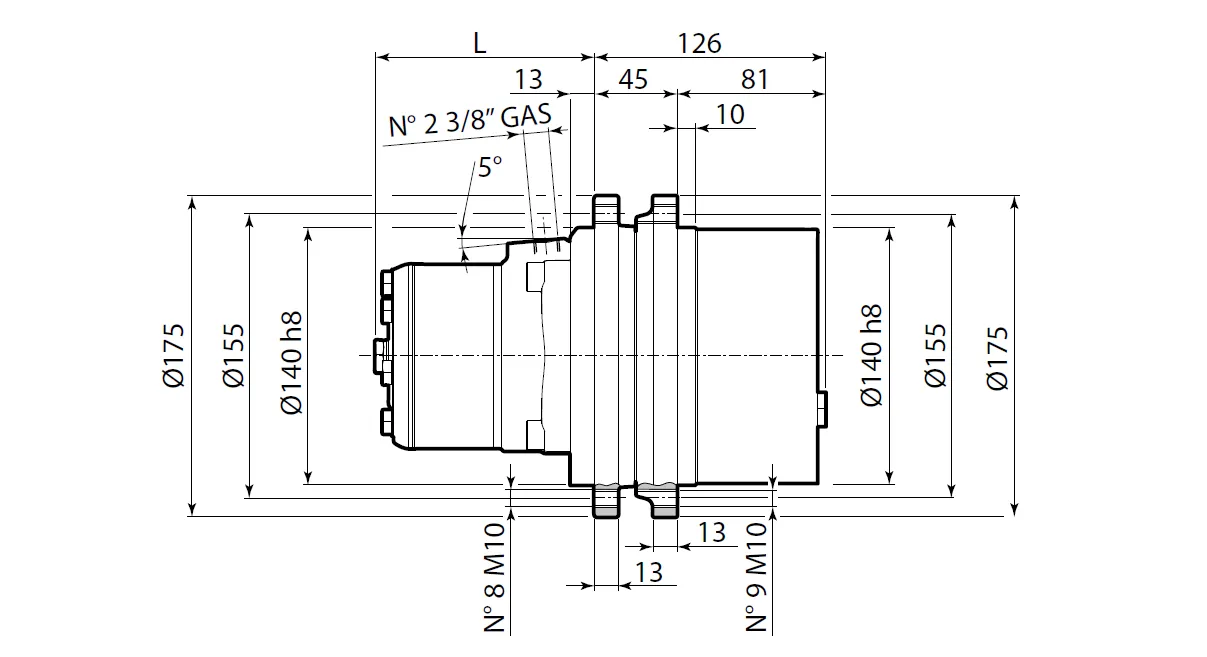
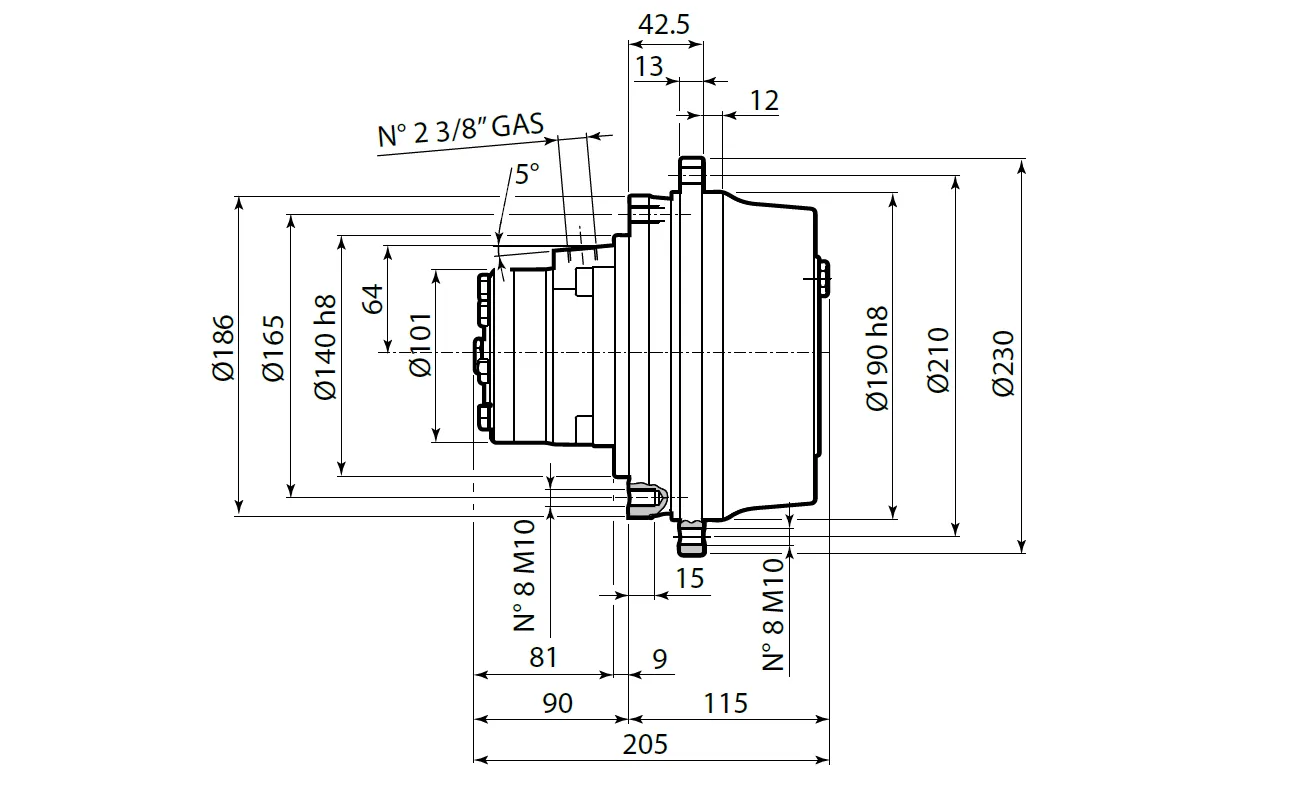
Abmessungen des Planetenradantriebs
Technische Definitionen
| Symbole | Maßeinheiten | Beschreibung |
| ich | - | Untersetzungsverhältnis |
| T2max | [Nm] | Maximales Ausgangsdrehmoment |
| T2p | [Nm] | Spitzenausgangsdrehmoment |
| T2maxint | [Nm] | Maximales intermittierendes Drehmoment |
| T2cont | [Nm] | Dauerhaftes Ausgangsdrehmoment |
| Pcont | [kW] | Maximale Dauerleistung |
| Pint | [kW] | Maximale intermittierende Leistung |
| n1max | [U/min] | Maximale Eingangsgeschwindigkeit |
| n2max | [U/min] | Maximale Ausgangsdrehzahl |
GR 80
| Typ | Motordisp. [cc] | Gesamtanzeige [cc] | ich | Drehmoment | Geschwindigkeit n2max | Leistung | |||||||
| T2cont | T2maxint | T2p | Pcont [kW] | Pint [kW] | |||||||||
| [Nm] | Δp [bar] | [Nm] | Δp [bar] | [Nm] | Δp [bar] | [U/min] | portata fließen [l/min] | ||||||
| GR80-MR50 | 51,6 | 269,9 | 5,23 | 470 | 145 | 570 | 175 | 630 | 205 | 115 | 30 | 5,5 | 7 |
| GR80-MR80 | 80,3 | 420,0 | 800 | 145 | 960 | 175 | 1060 | 205 | 68 | 30 | 5,5 | 7 | |
| GR80-MR100 | 99,8 | 522,0 | 800 | 115 | 1000 | 145 | 1310 | 205 | 55 | 30 | 5,5 | 7 | |
| GR80-MR125 | 125,7 | 657,4 | 800 | 95 | 1000 | 120 | 1500 | 190 | 45 | 30 | 5,5 | 7 | |
| GR80-MR160 | 159,6 | 834,7 | 800 | 75 | 1000 | 95 | 1500 | 145 | 33 | 30 | 5 | 7 | |
| GR80-MR200 | 199,8 | 1045,0 | 800 | 60 | 1000 | 75 | 1500 | 115 | 26 | 30 | 5 | 7 | |
| GR80-MR250 | 249,3 | 1303,8 | 800 | 50 | 1000 | 60 | 1500 | 95 | 21 | 30 | 4,5 | 6 | |
GR 200
| Typ | Motordisp. [cc] | Gesamtanzeige [cc] | ich | Drehmoment | Geschwindigkeit N2max | Leistung | |||||||
| T2Fortsetzung | T2maxint | T2P | Pcont [kW] | Pint [kW] | |||||||||
| [Nm] | Δp [bar] | [Nm] | Δp [bar] | [Nm] | Δp [bar] | [U/min] | portata fließen [l/min] | ||||||
| GR200-MR50 | 51,6 | 319,9 | 6,20 | 560 | 145 | 670 | 175 | 740 | 205 | 98 | 30 | 5,5 | 7 |
| GR200-MR80 | 80,3 | 497,9 | 950 | 145 | 1150 | 175 | 1250 | 205 | 58 | 30 | 5,5 | 7 | |
| GR200-MR100 | 99,8 | 618,8 | 1180 | 145 | 1420 | 175 | 1560 | 205 | 46 | 30 | 5,5 | 7 | |
| GR200-MR125 | 125,7 | 779,3 | 1450 | 145 | 1750 | 175 | 1920 | 205 | 38 | 30 | 5,5 | 7 | |
| GR200-MR160 | 159,6 | 989,5 | 1600 | 125 | 2100 | 165 | 2450 | 205 | 29 | 30 | 5 | 7 | |
| GR200-MR200 | 199,8 | 1238,8 | 1600 | 100 | 2150 | 135 | 2500 | 165 | 23 | 30 | 5 | 7 | |
| GR200-MR250 | 249,3 | 1545,7 | 1600 | 80 | 2150 | 105 | 2500 | 135 | 18 | 30 | 4,5 | 6 | |
| GR200-MR315 | 315,7 | 1957,3 | 1600 | 65 | 2150 | 85 | 2500 | 110 | 15 | 30 | 4 | 5 | |
| GR200-MR375 | 372,6 | 2310,1 | 1600 | 55 | 2150 | 70 | 2500 | 90 | 12 | 30 | 3,5 | 4,5 | |
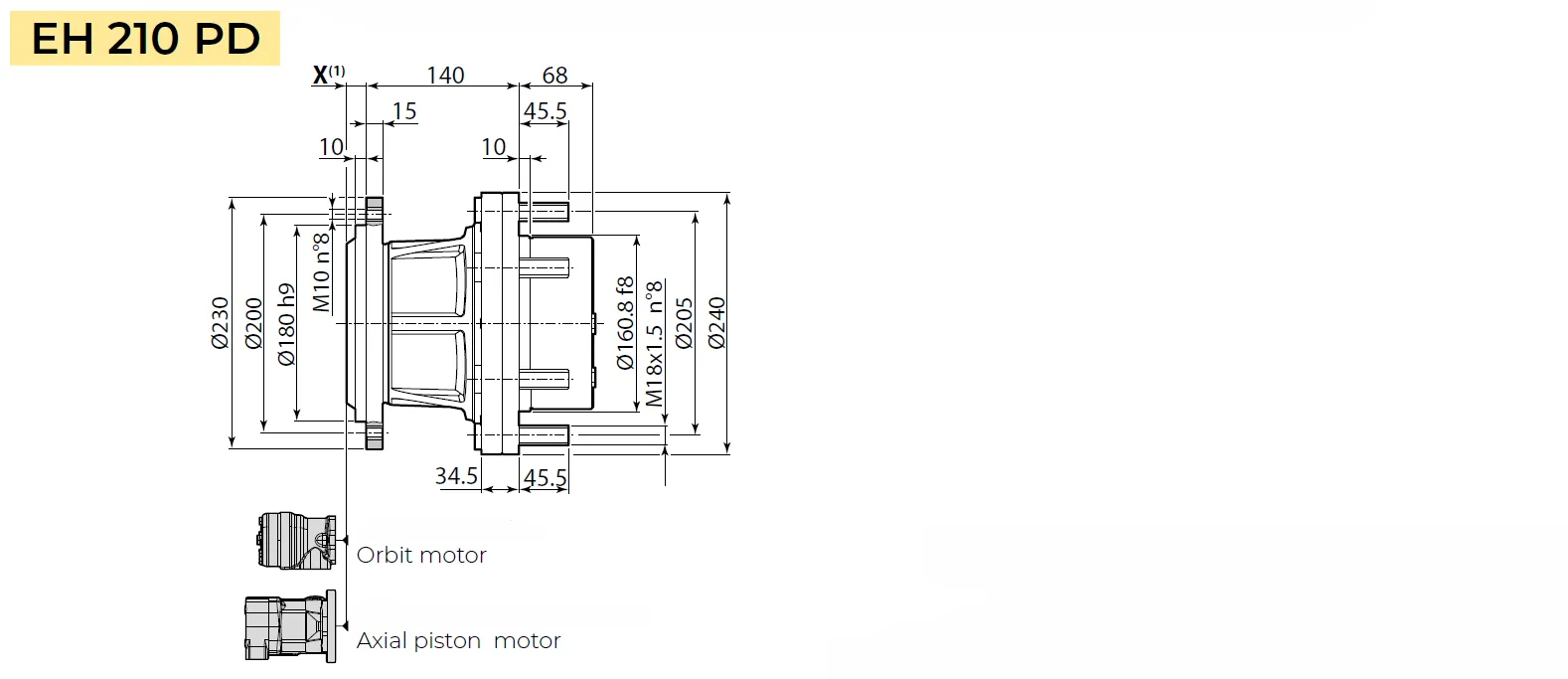
EH 210
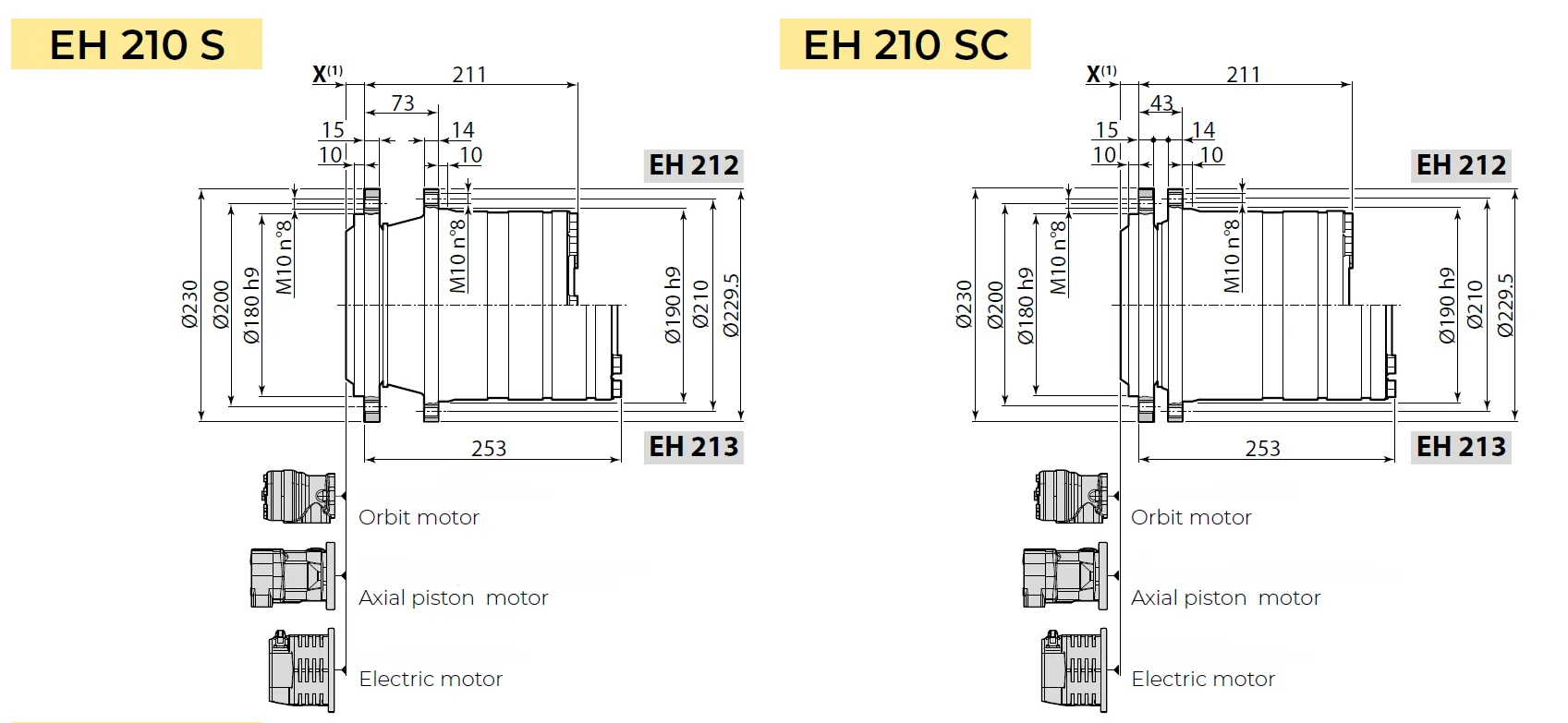
| Typ | Gewicht | Ölmenge | i (da÷a / From÷to) | T2max [Nm] | n1max [U/min] | ||||
| EH 212 | EH 213 | EH 212 | EH 213 | EH 212 | EH 213 | ||||
| EH 210 S | 35 | 40 | 0.8 | 1 | 11 ÷ 29 | 41 ÷ 129 | 3950 | 3500 | |
| EH 210 SC | |||||||||
| EH 210 PD | - | - | |||||||
EH 240
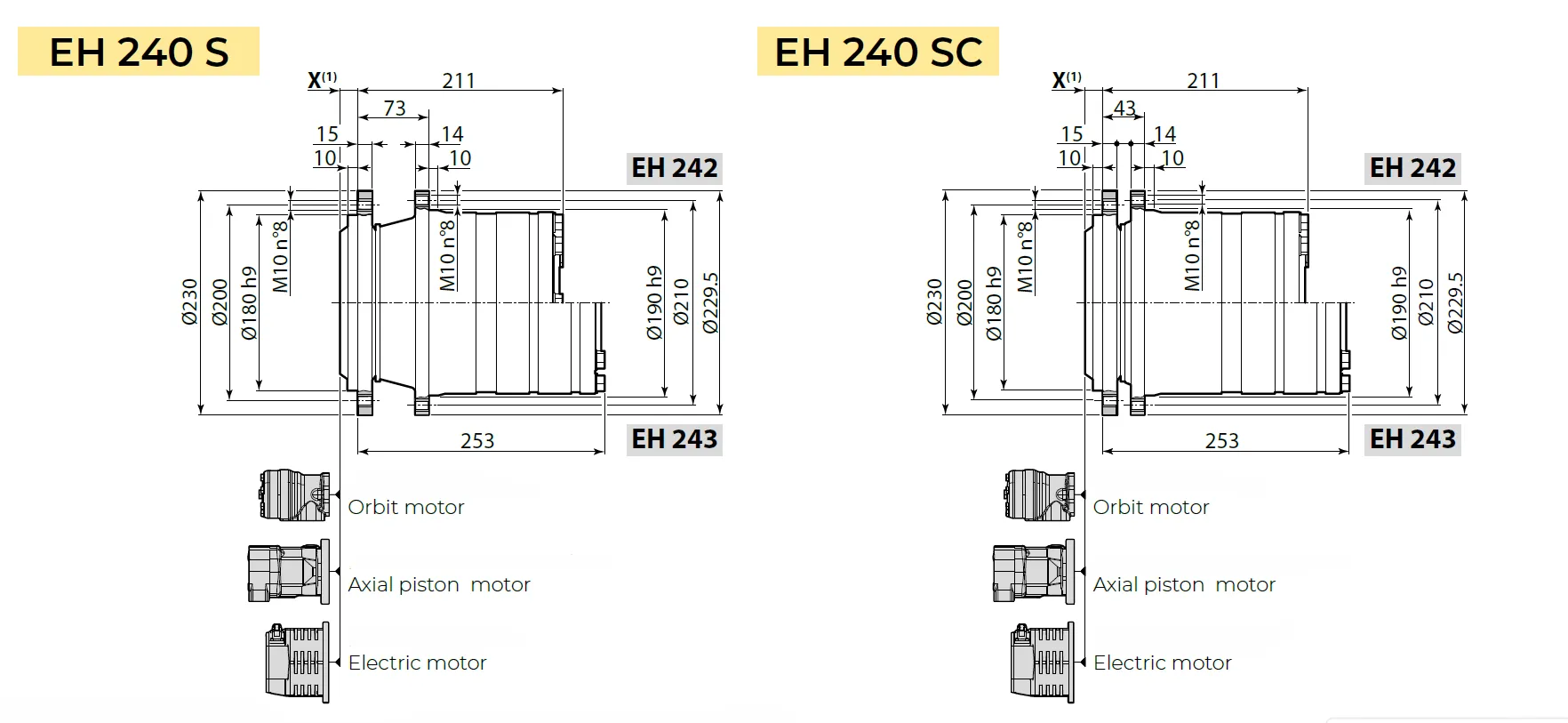
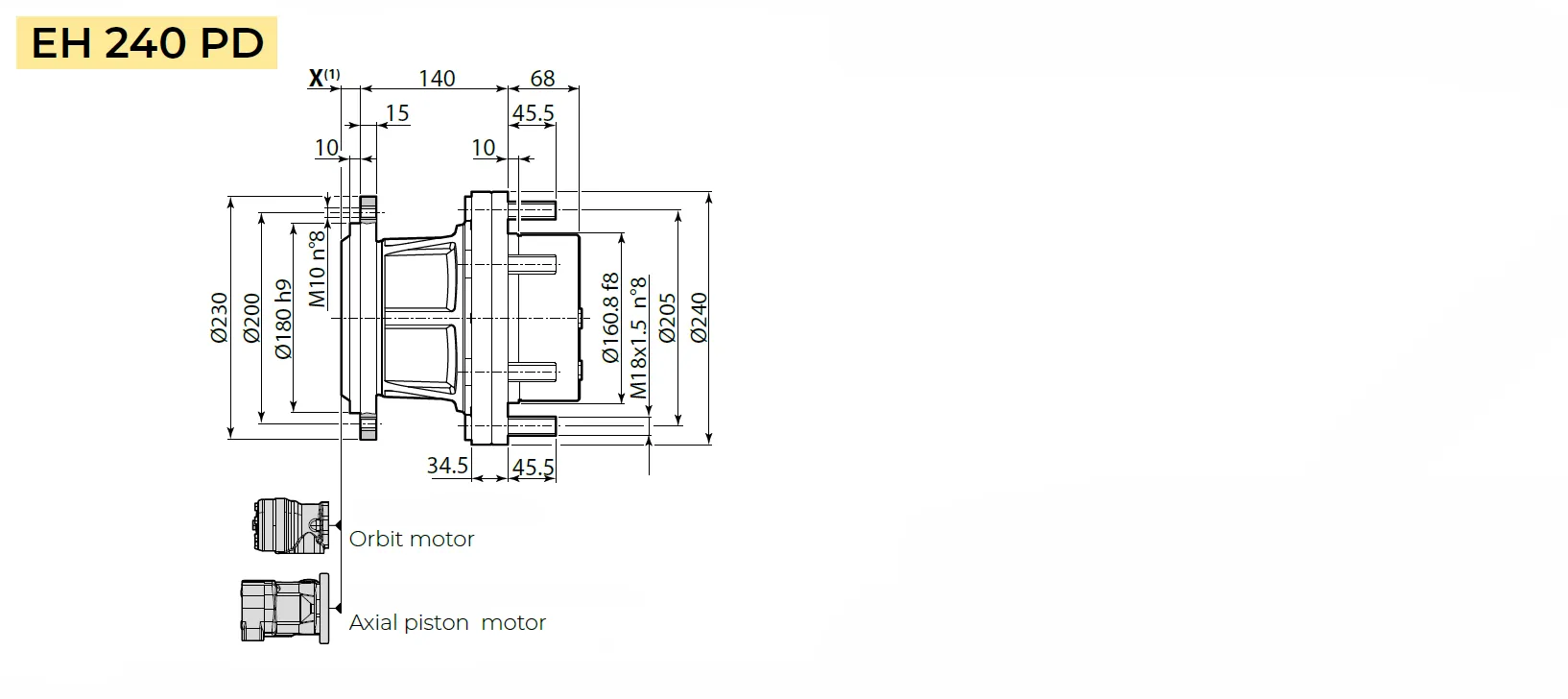
| Typ | Gewicht | Ölmenge | i (da÷a / From÷to) | T2max [Nm] | n1max [U/min] | ||||
| EH 242 | EH 243 | EH 242 | EH 243 | EH 242 | EH 243 | ||||
| EH 240 S | 35 | 40 | 0.8 | 1 | 12 ÷ 31 | 45 ÷ 135 | 5600 | 3500 | |
| EH 240 SC | |||||||||
| EH 240 PD | - | - | |||||||
EH 350
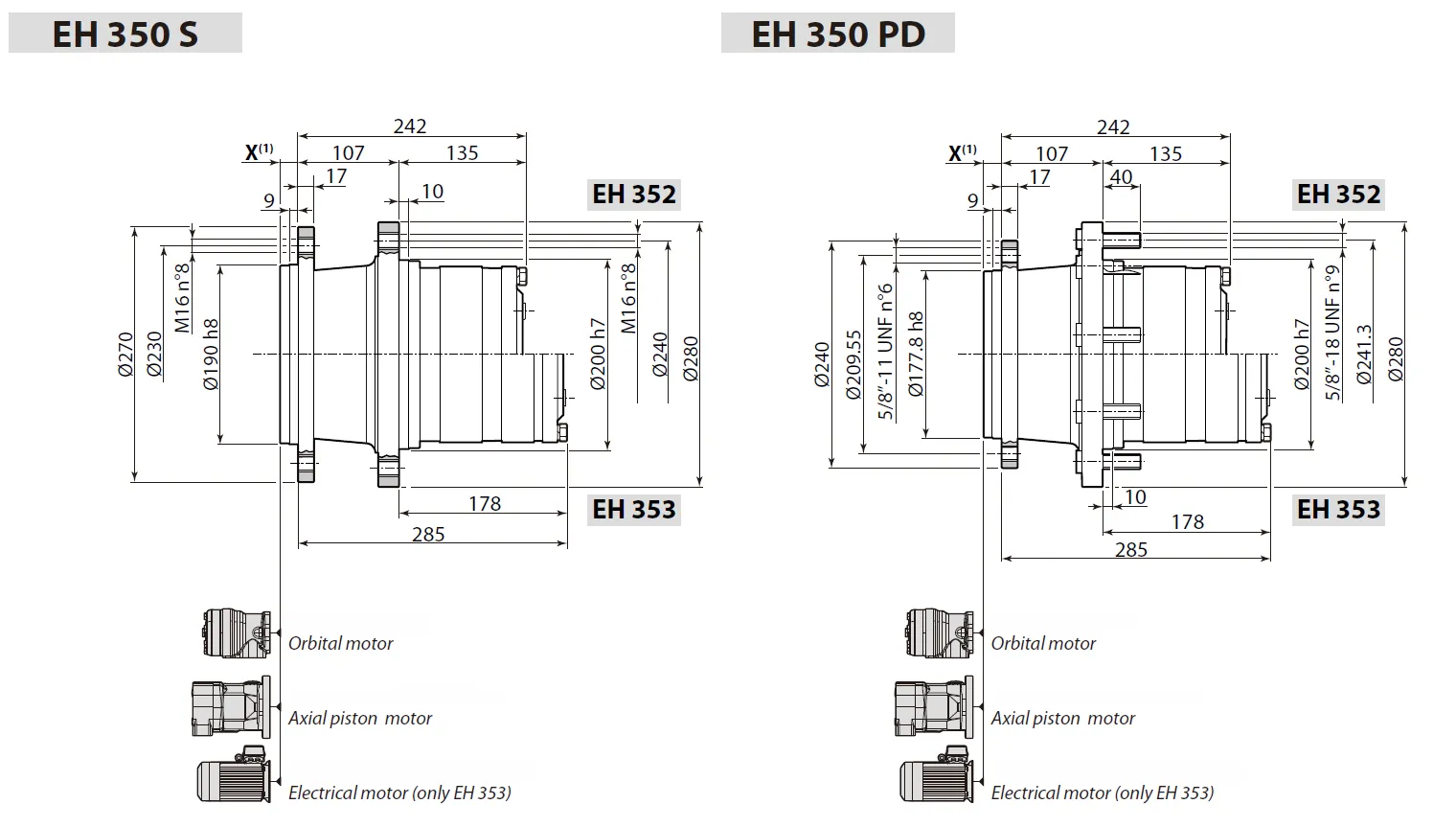
| Typ | Gewicht | Ölmenge | i (da÷a / From÷to) | T2max [Nm] | n1max [U/min] | ||||
| EH 352 | EH 353 | EH 352 | EH 353 | EH 352 | EH 353 | ||||
| EH 350 S | 55 | 60 | 1 | 1.2 | 15 ÷ 31 | 52 ÷ 135 | 7200 | 3500 | |
| EH 350 PD | |||||||||
EH 610
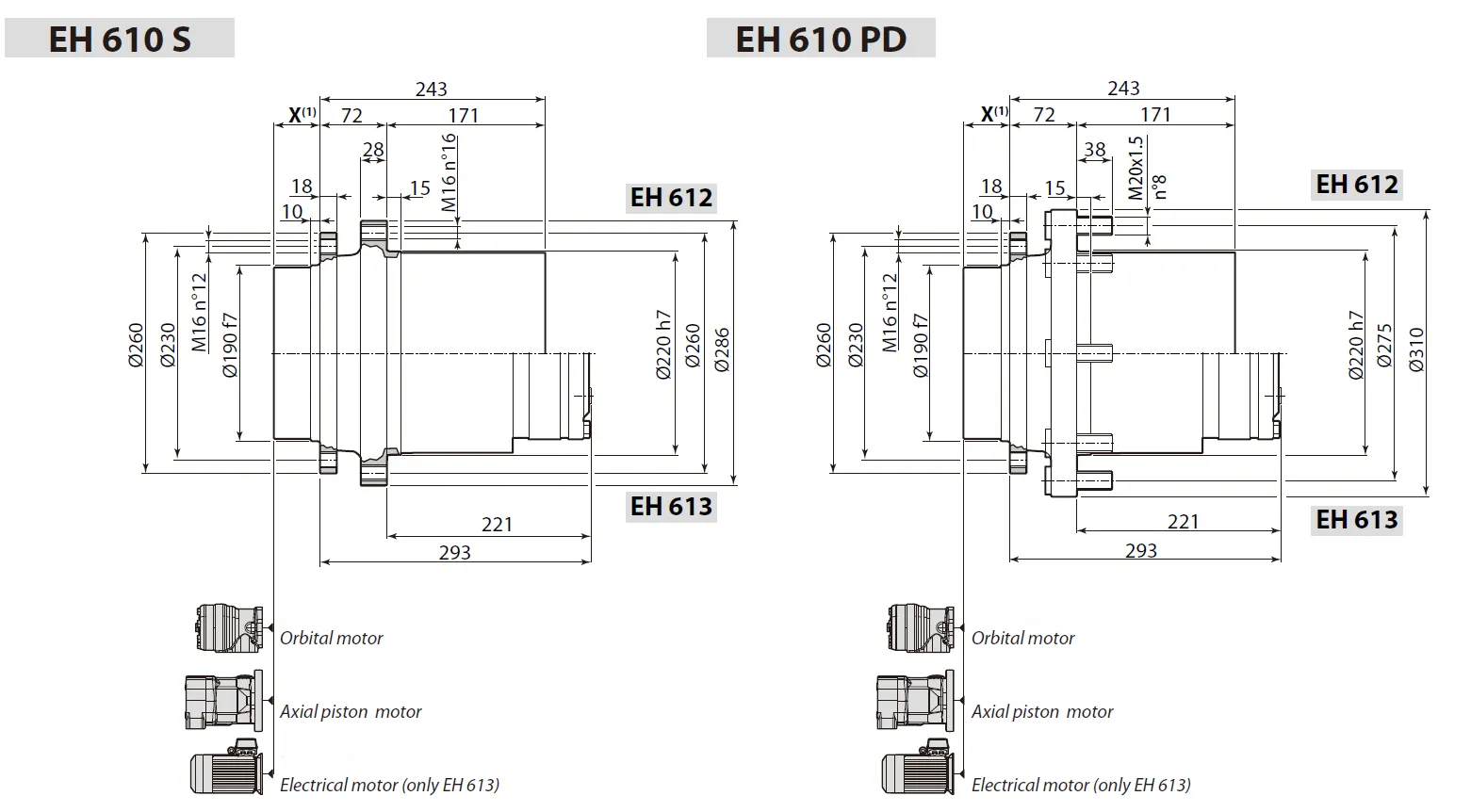
| Typ | Gewicht | Ölmenge | i (da÷a / From÷to) | T2max [Nm] | n1max [U/min] | ||||
| EH 612 | EH 613 | EH 612 | EH 613 | EH 612 | EH 613 | ||||
| EH 610 S | 60 | 70 | 1.2 | 1.5 | 12 ÷ 31 | 47 ÷ 138 | 13500 | 3500 | |
| EH 610 PD | |||||||||
EH 910
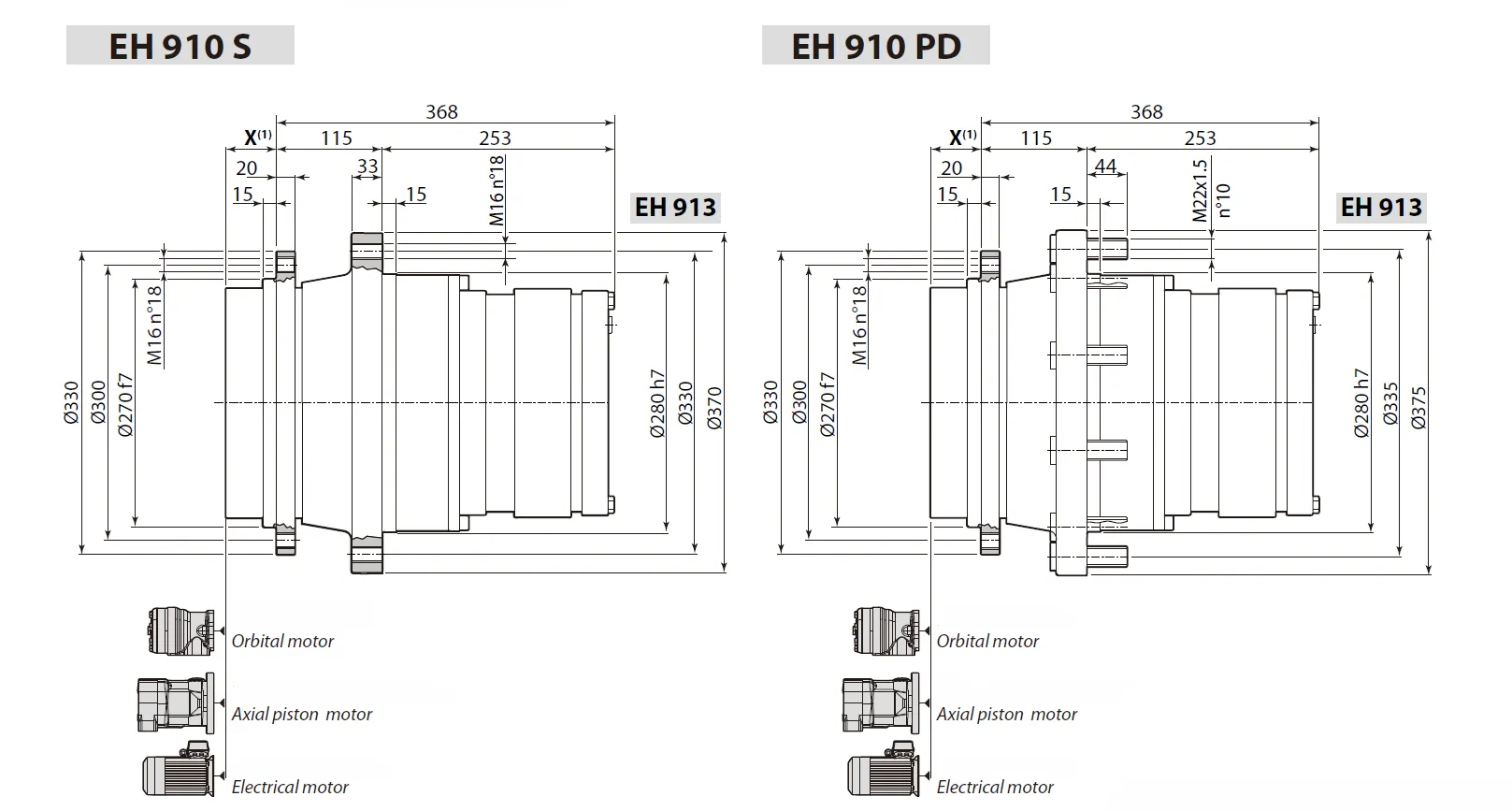
| Typ | Gewicht | Ölmenge | i (da÷a / From÷to) | T2max | n1max | |
| EH 913 | EH 913 | EH 913 | [Nm] | [U/min] | ||
| EH 910 S | 130 | 1 | 47 ÷ 131 | 24200 | 3500 | |
| EH 910 PD | ||||||
S-Version

| Größe | Maße | ||||||||||
| D1 | D2 | T3 | D4 | D5 | D6 | D7 | D8 | L1 | L2 | L3 | |
| EH 210 S | 230 | 200 | 180 h9 | 190 h9 | 210 | 229.5 | M10 Nr. 8 | M10 Nr. 8 | 253 | 73 | 180 |
| EH 240 S | 230 | 200 | 180 h9 | 190 h9 | 210 | 229.5 | M10 Nr. 8 | M10 Nr. 8 | 253 | 73 | 180 |
| EH 350 S | 270 | 230 | 190 h8 | 200 h7 | 240 | 280 | M16 Nr. 8 | M16 Nr. 8 | 242 | 107 | 178 |
| EH 610 S | 260 | 230 | 190 f7 | 220 h7 | 260 | 286 | M16 Nr. 12 | M16 Nr. 16 | 243 | 72 | 171 |
| EH 910 S | 330 | 300 | 270 f7 | 280 h7 | 350 | 370 | M16 Nr. 18 | M16 Nr. 18 | 368 | 115 | 253 |
PD-Version
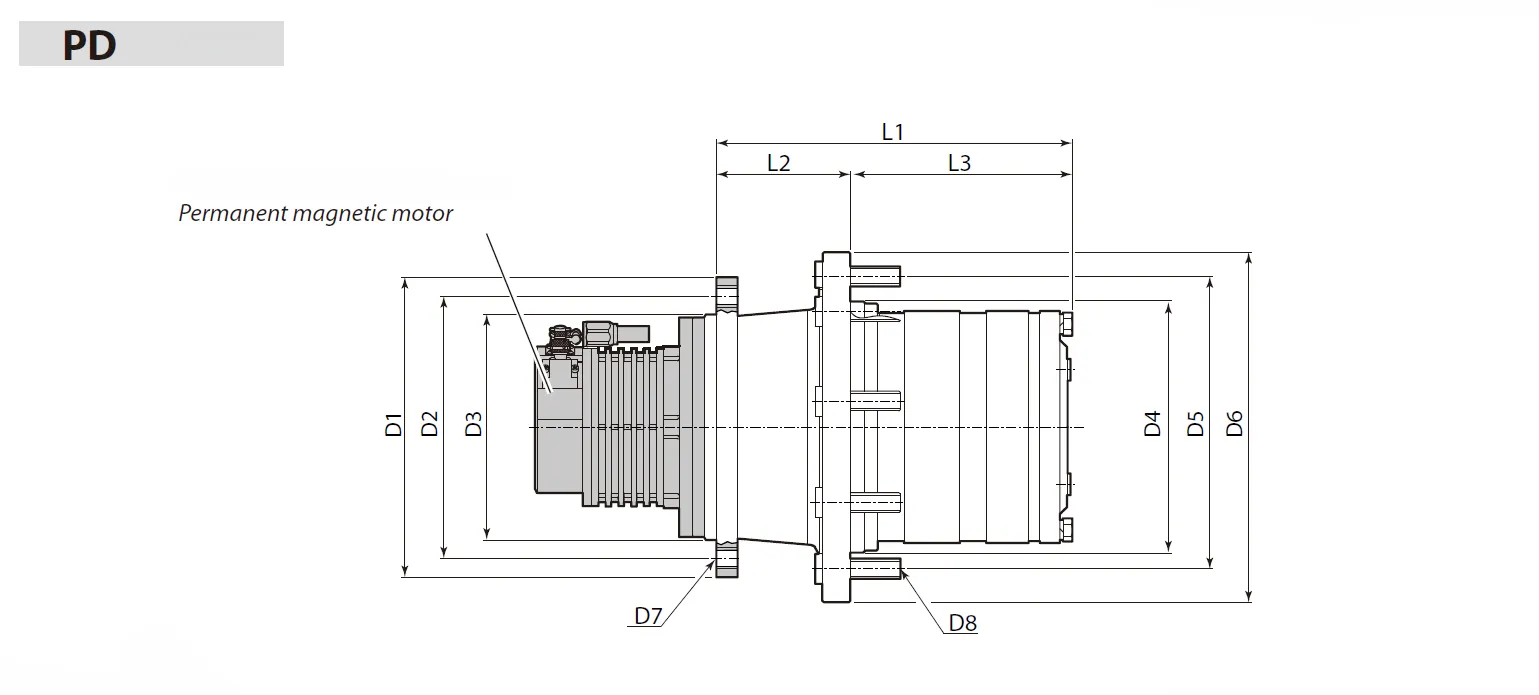
| Größe | Maße | ||||||||||
| D1 | D2 | T3 | D4 | D5 | D6 | D7 | D8 | L1 | L2 | L3 | |
| EH 210 PD | 230 | 200 | 180 h9 | 160.8 f8 | 205 | 240 | M10 (8x) | M18x1,5 (6x) | 210 | 140 | 70 |
| EH 240 PD | 230 | 200 | 180 h9 | 160.8 f8 | 205 | 240 | M10 (8x) | M18x1,5 (6x) | 210 | 140 | 70 |
| EH 350 PD | 240 | 209.55 | 177.8 h8 | 200 h7 | 241.3 | 280 | 5/8"-11 UNC (6x) | 5/8"-19 UNF (9x) | 285 | 107 | 178 |
| EH 610 PD | 260 | 230 | 190 f7 | 220 h7 | 275 | 310 | M16 (12x) | M20x1,5 (8x) | 293 | 72 | 221 |
| EH 910 PD | 330 | 300 | 270 f7 | 280 h7 | 335 | 375 | M16 (18x) | M22x1,5 (10x) | 368 | 115 | 253 |
Merkmale des Planetenradantriebsgetriebes für Teleskoparbeitsbühnen
1. Hohe Drehmomentverstärkung und Ausgangsleistung
Planetengetriebe zeichnen sich durch ihre hohe Drehmomentverstärkung dank ihrer Planetenradanordnung aus. Dies ist unerlässlich für den Antrieb von Schwerlast-Teleskoparbeitsbühnen bei Hebe- und Transportaufgaben auf anspruchsvollem Untergrund. Diese Eigenschaft gewährleistet zuverlässige Leistung unter hohen Lasten und steigert die Betriebseffizienz bei Bau- und Instandhaltungsarbeiten.
2. Breites Spektrum an Reduktionsverhältnissen
Diese Planetengetriebe bieten vielseitige Übersetzungsverhältnisse und ermöglichen so die Anpassung an unterschiedliche Geschwindigkeits- und Drehmomentanforderungen von Teleskoparbeitsbühnen. Diese Flexibilität unterstützt verschiedene industrielle Anwendungen, von präzisen Manövern bei niedrigen Geschwindigkeiten bis hin zu schnellen Fahrten, und optimiert die Anpassungsfähigkeit der Maschine an verschiedene Arbeitsumgebungen.
3. Verbesserte Stabilität und Traktion auf unebenem Gelände
Die für den Einsatz mit Allradantriebssystemen konzipierten Planetengetriebe bieten durch den Einsatz von Pendelachsen und Planetengetrieben eine stabile Traktion und Lastaufnahme, insbesondere auf unebenem oder abschüssigem Gelände. Dies trägt zu einem sichereren Betrieb und einer verbesserten Maschinenbalance beim Ausfahren und Drehen des Auslegers bei.
4. Kompakte und robuste Bauweise für anspruchsvolle Anwendungen
Diese Planetengetriebe mit hochfesten Zahnrädern und Naben sind kompakt gebaut und halten den hohen Anforderungen von Teleskoparbeitsbühnen stand, einschließlich extremer Bedingungen und schwerer Nutzlasten. Ihre robuste Konstruktion minimiert den Verschleiß, verlängert die Lebensdauer und ermöglicht die nahtlose Integration in Rad- oder Kettenantriebe, ohne die Stellfläche der Gesamtanlage zu beeinträchtigen.
5. Effiziente Drehzahlreduzierung und Drehmomenterzeugung
Durch den Einsatz eines Planetengetriebes reduziert der Planetenradantrieb effektiv die Drehzahl des Radmotors und verstärkt gleichzeitig die Drehkraft. Dies ist entscheidend für die kontrollierte Bewegung von Hubarbeitsbühnen. Diese Effizienz führt zu geringerem Energieverbrauch, reduzierten Betriebskosten und einem ruhigeren Lauf der hydrostatischen Antriebe, die häufig in Teleskoparbeitsbühnen zum Einsatz kommen.

Anwendungen von Planetenradantrieben
1. Baumaschinen
Planetengetriebe mit Radantrieb finden breite Anwendung in Baumaschinen wie Baggern, Ladern und Teleskoparbeitsbühnen. Sie ermöglichen ein hohes Drehmoment und eine präzise Drehzahlreduzierung für den Antrieb auf unebenem Gelände. Ihre kompakte Bauweise gewährleistet eine effiziente Kraftübertragung und verbessert so die Maschinenstabilität und die Tragfähigkeit bei anspruchsvollen Arbeiten wie Graben, Heben und Materialtransport auf Baustellen.
2. Landwirtschaftliche Maschinen
In der Landwirtschaft treiben diese Planetengetriebe die Räder von Traktoren, Mähdreschern und Feldspritzen an und sorgen für eine robuste Drehmomentverstärkung, um auch auf weichen Böden und an Hängen effizient arbeiten zu können. Dies ermöglicht zuverlässiges Arbeiten im Pflanzenbau, reduziert Ausfallzeiten und steigert die Produktivität auf großen landwirtschaftlichen Flächen unter verschiedenen Umweltbedingungen.
3. Fahrerlose Transportsysteme (FTS)
Planetenradantriebe sind integraler Bestandteil von fahrerlosen Transportsystemen (AGVs) in Lagerhallen und Produktionsstätten und ermöglichen einen reibungslosen, hochpräzisen Radnabenantrieb für den automatisierten Materialtransport. Sie unterstützen die kompakte Integration mit Elektromotoren und gewährleisten so einen geräuscharmen Betrieb und eine lange Lebensdauer in Logistikumgebungen, die kontinuierliche und zuverlässige Mobilität erfordern.
4. Schwere Lkw und Busse
Diese Planetengetriebe werden in den Radnaben von schweren Lkw und Bussen eingesetzt, um eine deutliche Drehmomentverstärkung und Drehzahlregelung zu erreichen und so Kraftstoffverbrauch und Fahrverhalten auf Autobahnen und im Stadtverkehr zu optimieren. Ihre robuste Bauweise hält hohen Belastungen stand und trägt zu einem sichereren und wirtschaftlicheren Transport in Nutzfahrzeugflotten bei.
5. Bergbau- und Erdbewegungsmaschinen
Im Bergbau treiben Radantriebsgetriebe Radfahrzeuge wie Muldenkipper und Bohrgeräte an und liefern ein außergewöhnliches Drehmoment für den Transport schwerer Lasten in unwegsamem Gelände. Diese Anwendung erhöht die Zuverlässigkeit der Ausrüstung, minimiert den Wartungsaufwand und unterstützt kontinuierliche Abbauprozesse in rauen, abrasiven Umgebungen.
6. Materialflusssysteme
Diese Planetenradantriebe, die in Gabelstaplern, Förderbändern und Kränen eingesetzt werden, ermöglichen präzises Manövrieren und Heben in industriellen Umgebungen durch kontrollierte Radantriebe. Sie bieten hohe Effizienz und Kompaktheit und optimieren Arbeitsabläufe in Lagerhallen und Produktionslinien durch einen stabilen und energieeffizienten Warentransport.
 |  |
| Planetenradantrieb für Gestängespritzen | Planetenradantrieb für Raddozer |
 |  |
| Planetenradantrieb für Radlader | Planetenradantrieb für Muldenkipper |
Herstellungsprozess für Planetengetriebe mit Radantrieb
1. Rohmaterialvorbereitung
Der Herstellungsprozess beginnt mit der Beschaffung hochwertiger Metalle wie Gusseisen, legiertem Stahl oder Edelstahl, gefolgt von strengen Qualitätskontrollen zur Beseitigung von Verunreinigungen und einem Vorzuschnitt zur Herstellung von Rohlingen, die annähernd die erforderlichen Formen und Abmessungen für Bauteile wie Planetenträger und Zahnräder aufweisen.
2. Schmieden und Gießen
Wesentliche Bauteile wie Planetenradträger, Sonnenräder und innere Zahnkränze werden durch Schmieden geformt, indem Metalle bei hohen Temperaturen erhitzt und durch Hämmern oder Pressen bearbeitet werden. Für größere oder kompliziertere Strukturen wird das Gießen eingesetzt, um präzise Vorformen zu erzielen.
3. Schruppbearbeitung
Mithilfe von CNC-Werkzeugmaschinen werden die geschmiedeten oder gegossenen Rohlinge gedreht, gefräst und gebohrt, um überschüssiges Material zu entfernen und so grundlegende Konturen, Strukturmerkmale und Elemente wie innere und äußere zylindrische Oberflächen, Ebenen, Keilnuten und Gewindebohrungen für die Getriebemontage zu erzeugen.
4. Erste Wärmebehandlung
Nach der Grobbearbeitung werden die Teile Normalisierungs-, Glüh- oder Anlassbehandlungen unterzogen, die auf die Materialeigenschaften abgestimmt sind. Dadurch werden die inneren Metallstrukturen verbessert, Härte und Zähigkeit angepasst und die Bauteile für die nachfolgende Präzisionsbearbeitung vorbereitet, um Haltbarkeit und Leistungsfähigkeit zu gewährleisten.
5. Präzisionsbearbeitungstechniken
Wärmebehandelte Bauteile werden Schleif-, Hon- und Wälzfräsverfahren unterzogen, wobei Planetenräder durch Wälzfräsen, Schaben oder Nutenfräsen geformt werden und die Träger einem Präzisionsschleifen und -planen unterzogen werden, um exakte Zahnprofile, Genauigkeit und Oberflächenrauheitsstandards zu erfüllen.
6. Sekundäre Wärmebehandlung
Zur Verbesserung der Verschleißfestigkeit in stark beanspruchten Bereichen wie Zahnrädern werden Aufkohlungshärten, Nitrieren oder Oberflächenhärten angewendet, um vorzeitigen Verschleiß und Ermüdungsbrüche bei längerem Betrieb in anspruchsvollen Radantriebsanwendungen zu verhindern.
7. Abschließende Präzisionsbearbeitung und Qualitätsprüfung
Weitere Schleif-, Polier- und Ultrapräzisionsverfahren verfeinern Zahnräder und Schlüsselbauteile für höchste Genauigkeit und Oberflächenqualität. Darauf folgen umfassende Prüfungen, darunter Maßkontrollen, Härteprüfungen und zerstörungsfreie Verfahren wie Magnetpulver- oder Ultraschallprüfungen, um Defekte wie Risse oder Einschlüsse zu erkennen.
8. Montage- und Funktionsprüfung
Die gereinigten Bauteile werden mit Spezialölen oder -fetten geschmiert und gemäß den Konstruktionsvorgaben montiert, um einen ordnungsgemäßen Zahneingriff und die korrekte Installation der Dichtungen zu gewährleisten. Abschließend erfolgen strenge Testphasen, die Leerlaufläufe, Lastsimulationen, Geräusch-, Vibrations- und Gesamtleistungsbewertungen umfassen, um die Langzeitstabilität unter Betriebsbedingungen zu bestätigen.

Zusätzliche Informationen
| Bearbeitet von | Yjx |
|---|
























