
Gearbox Penggerak Roda Planet untuk Lift Boom Teleskopik
Gearbox penggerak roda planet untuk lift boom teleskopik adalah sistem roda gigi epiklik yang ringkas dan berkinerja tinggi. Pada lift boom teleskopik, gearbox planet ini terutama diintegrasikan ke dalam sistem penggerak roda atau trek untuk memfasilitasi penggerakan yang stabil di medan yang tidak rata, lereng, dan ruang terbatas, serta ke dalam penggerak putar untuk kontrol rotasi yang presisi dari platform boom, memungkinkan pemosisian yang akurat selama tugas di ketinggian seperti pemeliharaan, konstruksi, atau inspeksi.
Gearbox penggerak roda planet untuk lift boom teleskopik adalah sistem roda gigi epiklik kompak dan berkinerja tinggi yang terdiri dari roda gigi matahari pusat, beberapa roda gigi planet, dan roda gigi cincin luar, yang dirancang untuk memberikan perkalian torsi dan pengurangan kecepatan yang substansial sambil mempertahankan efisiensi dan daya tahan dalam aplikasi yang menuntut. Pada lift boom teleskopik, gearbox planet ini terutama diintegrasikan ke dalam sistem penggerak roda atau trek untuk memfasilitasi penggerakan yang stabil di medan yang tidak rata, lereng, dan ruang terbatas, serta ke dalam penggerak putar untuk kontrol rotasi yang presisi dari platform boom, memungkinkan pemosisian yang akurat selama tugas di ketinggian seperti pemeliharaan, konstruksi, atau inspeksi.
Dimensi Penggerak Roda Planet
Definisi Teknis
| Simbol | Satuan pengukuran | Keterangan |
| Saya | - | Rasio pengurangan |
| T2max | [Nm] | Torsi keluaran maksimum |
| T2p | [Nm] | Torsi keluaran puncak |
| T2maxint | [Nm] | Torsi intermiten maksimum |
| T2cont | [Nm] | Torsi keluaran kontinu |
| Pcont | [kW] | Daya kontinu maksimum |
| Pint | [kW] | Daya intermiten maksimum |
| n1max | [rpm] | Kecepatan input maksimum |
| n2max | [rpm] | Kecepatan keluaran maksimum |
GR 80
| Jenis | Motor disp. [cc] | Total disp. [cc] | Saya | Torsi | Kecepatan n2max | Kekuatan | |||||||
| T2cont | T2maxint | T2p | Pcont [kW] | Pint [kW] | |||||||||
| [Nm] | Δp [bar] | [Nm] | Δp [bar] | [Nm] | Δp [bar] | [rpm] | portata mengalir [l/menit] | ||||||
| GR80-MR50 | 51,6 | 269,9 | 5,23 | 470 | 145 | 570 | 175 | 630 | 205 | 115 | 30 | 5,5 | 7 |
| GR80-MR80 | 80,3 | 420,0 | 800 | 145 | 960 | 175 | 1060 | 205 | 68 | 30 | 5,5 | 7 | |
| GR80-MR100 | 99,8 | 522,0 | 800 | 115 | 1000 | 145 | 1310 | 205 | 55 | 30 | 5,5 | 7 | |
| GR80-MR125 | 125,7 | 657,4 | 800 | 95 | 1000 | 120 | 1500 | 190 | 45 | 30 | 5,5 | 7 | |
| GR80-MR160 | 159,6 | 834,7 | 800 | 75 | 1000 | 95 | 1500 | 145 | 33 | 30 | 5 | 7 | |
| GR80-MR200 | 199,8 | 1045,0 | 800 | 60 | 1000 | 75 | 1500 | 115 | 26 | 30 | 5 | 7 | |
| GR80-MR250 | 249,3 | 1303,8 | 800 | 50 | 1000 | 60 | 1500 | 95 | 21 | 30 | 4,5 | 6 | |
GR 200
| Jenis | Motor disp. [cc] | Total disp. [cc] | Saya | Torsi | Kecepatan N2maksimal | Kekuatan | |||||||
| T2lanjut | T2maksimal | T2P | Pcont [kW] | Pint [kW] | |||||||||
| [Nm] | Δp [bar] | [Nm] | Δp [bar] | [Nm] | Δp [bar] | [rpm] | portata mengalir [l/menit] | ||||||
| GR200-MR50 | 51,6 | 319,9 | 6,20 | 560 | 145 | 670 | 175 | 740 | 205 | 98 | 30 | 5,5 | 7 |
| GR200-MR80 | 80,3 | 497,9 | 950 | 145 | 1150 | 175 | 1250 | 205 | 58 | 30 | 5,5 | 7 | |
| GR200-MR100 | 99,8 | 618,8 | 1180 | 145 | 1420 | 175 | 1560 | 205 | 46 | 30 | 5,5 | 7 | |
| GR200-MR125 | 125,7 | 779,3 | 1450 | 145 | 1750 | 175 | 1920 | 205 | 38 | 30 | 5,5 | 7 | |
| GR200-MR160 | 159,6 | 989,5 | 1600 | 125 | 2100 | 165 | 2450 | 205 | 29 | 30 | 5 | 7 | |
| GR200-MR200 | 199,8 | 1238,8 | 1600 | 100 | 2150 | 135 | 2500 | 165 | 23 | 30 | 5 | 7 | |
| GR200-MR250 | 249,3 | 1545,7 | 1600 | 80 | 2150 | 105 | 2500 | 135 | 18 | 30 | 4,5 | 6 | |
| GR200-MR315 | 315,7 | 1957,3 | 1600 | 65 | 2150 | 85 | 2500 | 110 | 15 | 30 | 4 | 5 | |
| GR200-MR375 | 372,6 | 2310,1 | 1600 | 55 | 2150 | 70 | 2500 | 90 | 12 | 30 | 3,5 | 4,5 | |
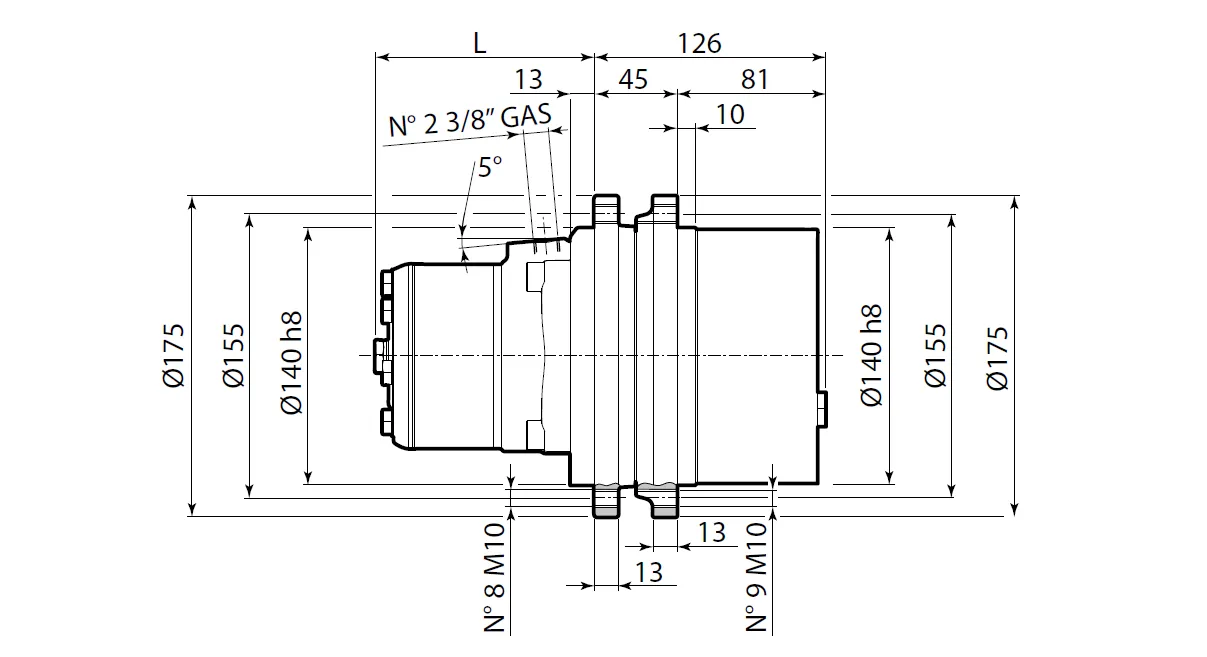
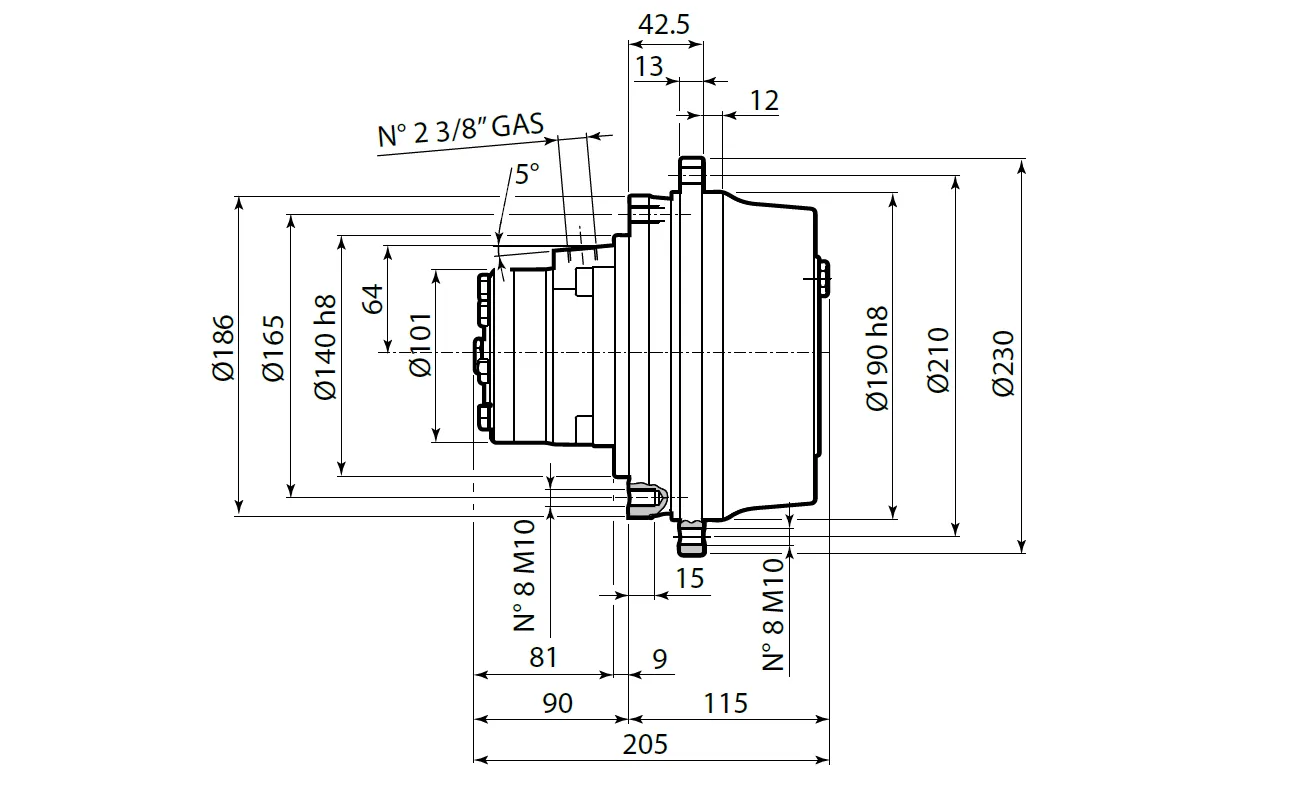
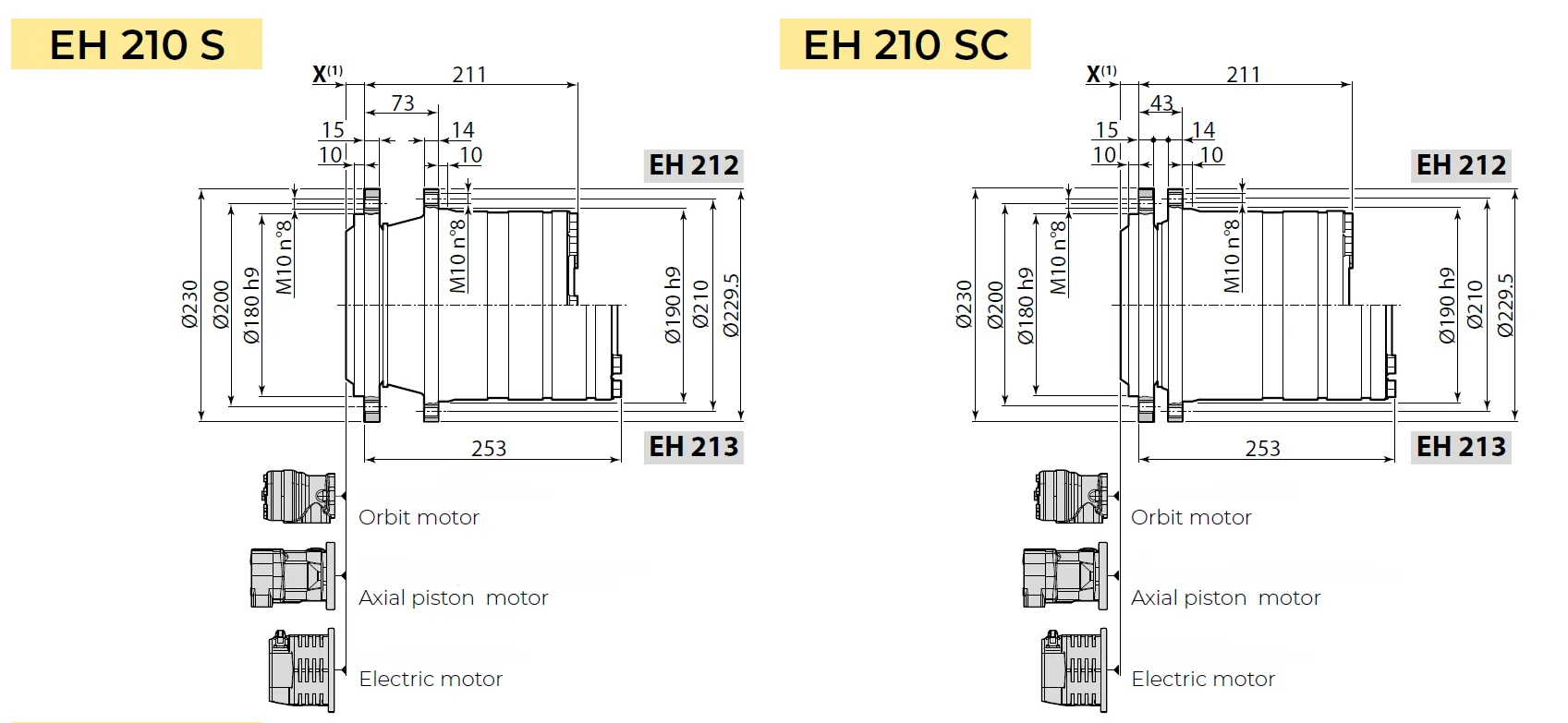
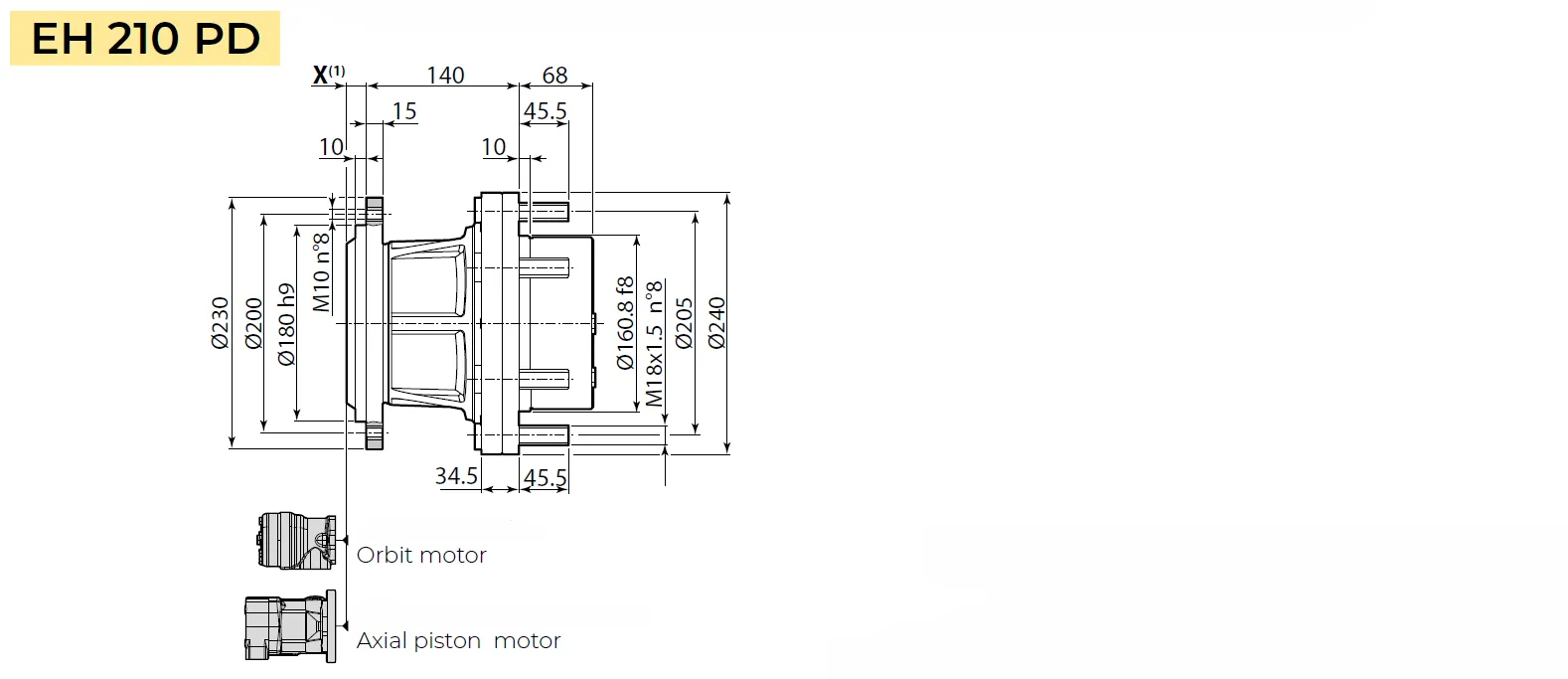
EH 210
| Jenis | Berat | Jumlah minyak | i (da÷a / Dari÷ke) | T2max [Nm] | n1max [rpm] | ||||
| EH 212 | EH 213 | EH 212 | EH 213 | EH 212 | EH 213 | ||||
| EH 210 S | 35 | 40 | 0.8 | 1 | 11 ÷ 29 | 41 ÷ 129 | 3950 | 3500 | |
| EH 210 SC | |||||||||
| EH 210 PD | - | - | |||||||
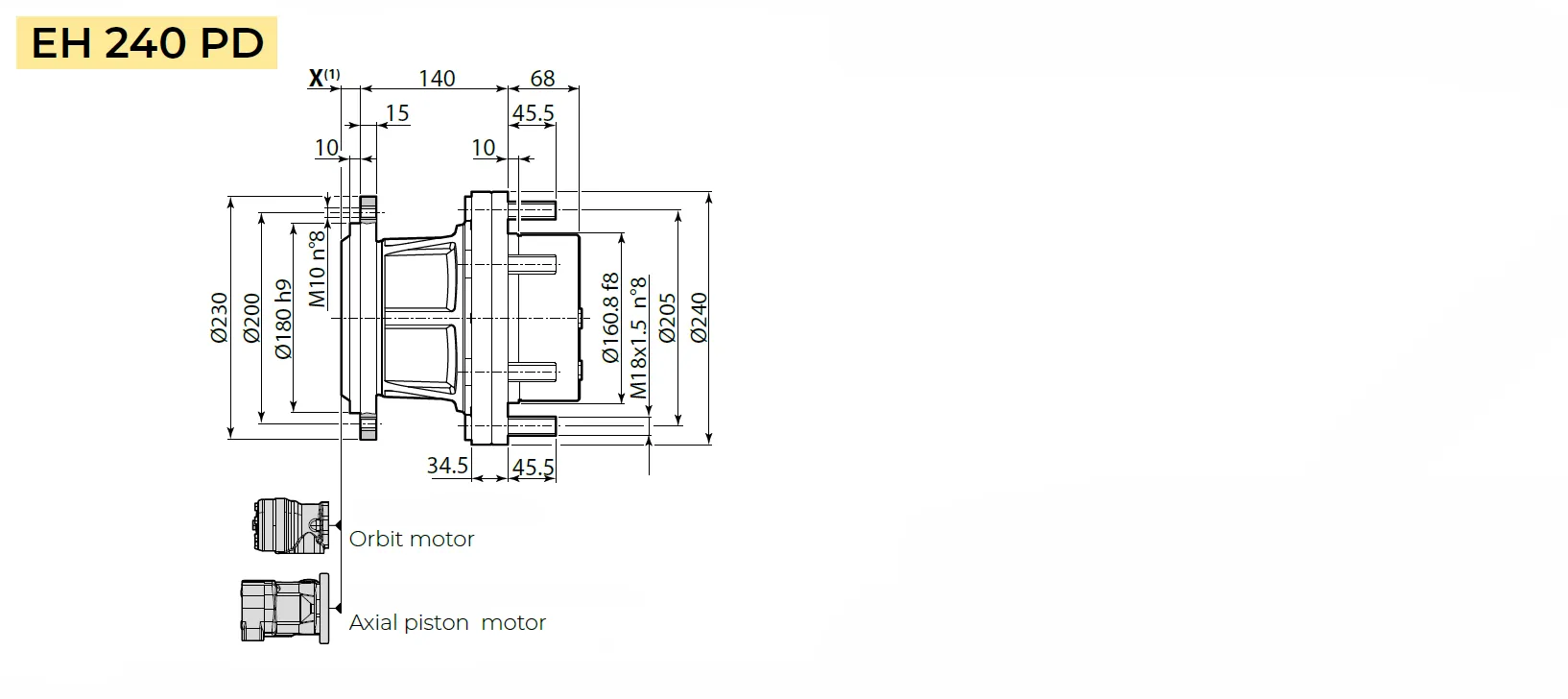
EH 240
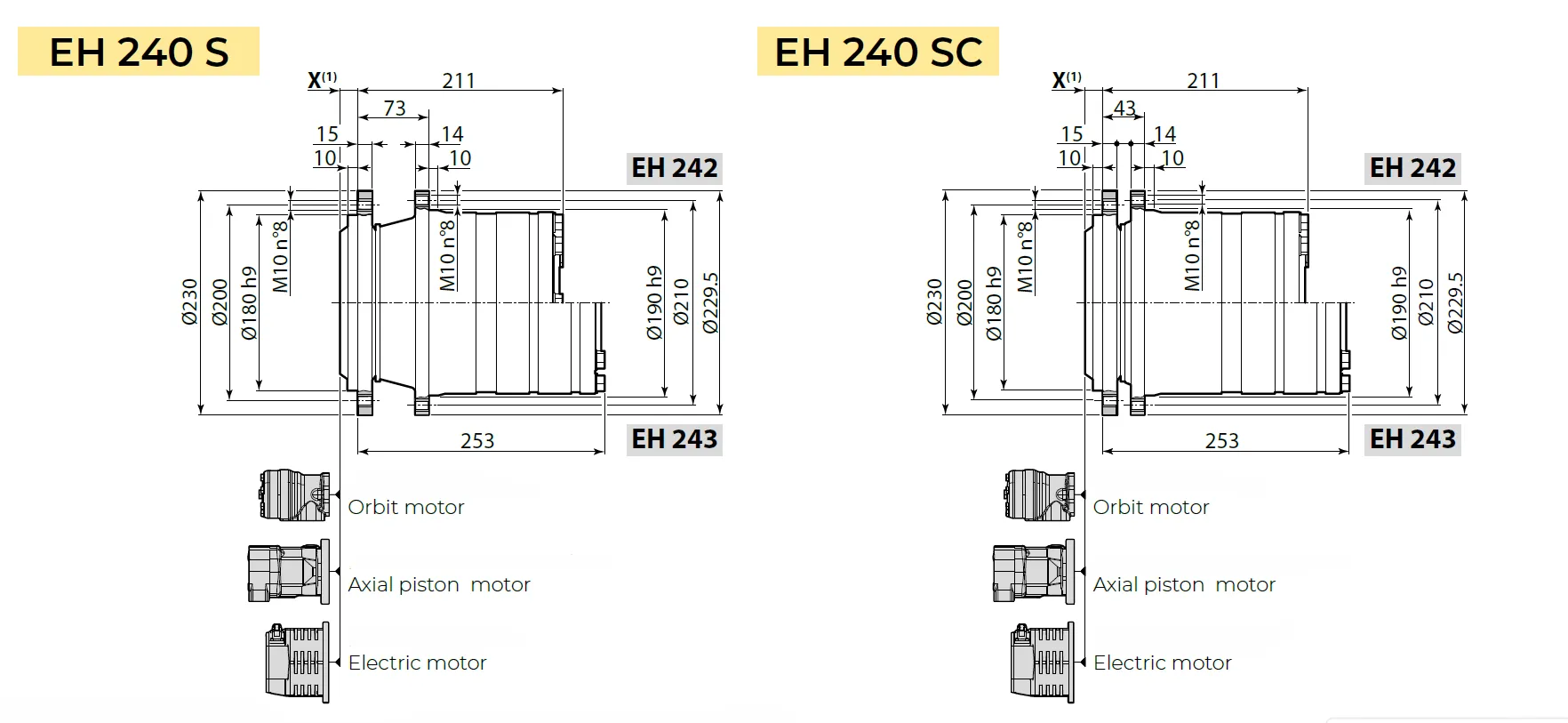
| Jenis | Berat | Jumlah minyak | i (da÷a / Dari÷ke) | T2max [Nm] | n1max [rpm] | ||||
| EH 242 | EH 243 | EH 242 | EH 243 | EH 242 | EH 243 | ||||
| EH 240 S | 35 | 40 | 0.8 | 1 | 12 ÷ 31 | 45 ÷ 135 | 5600 | 3500 | |
| EH 240 SC | |||||||||
| EH 240 PD | - | - | |||||||
EH 350
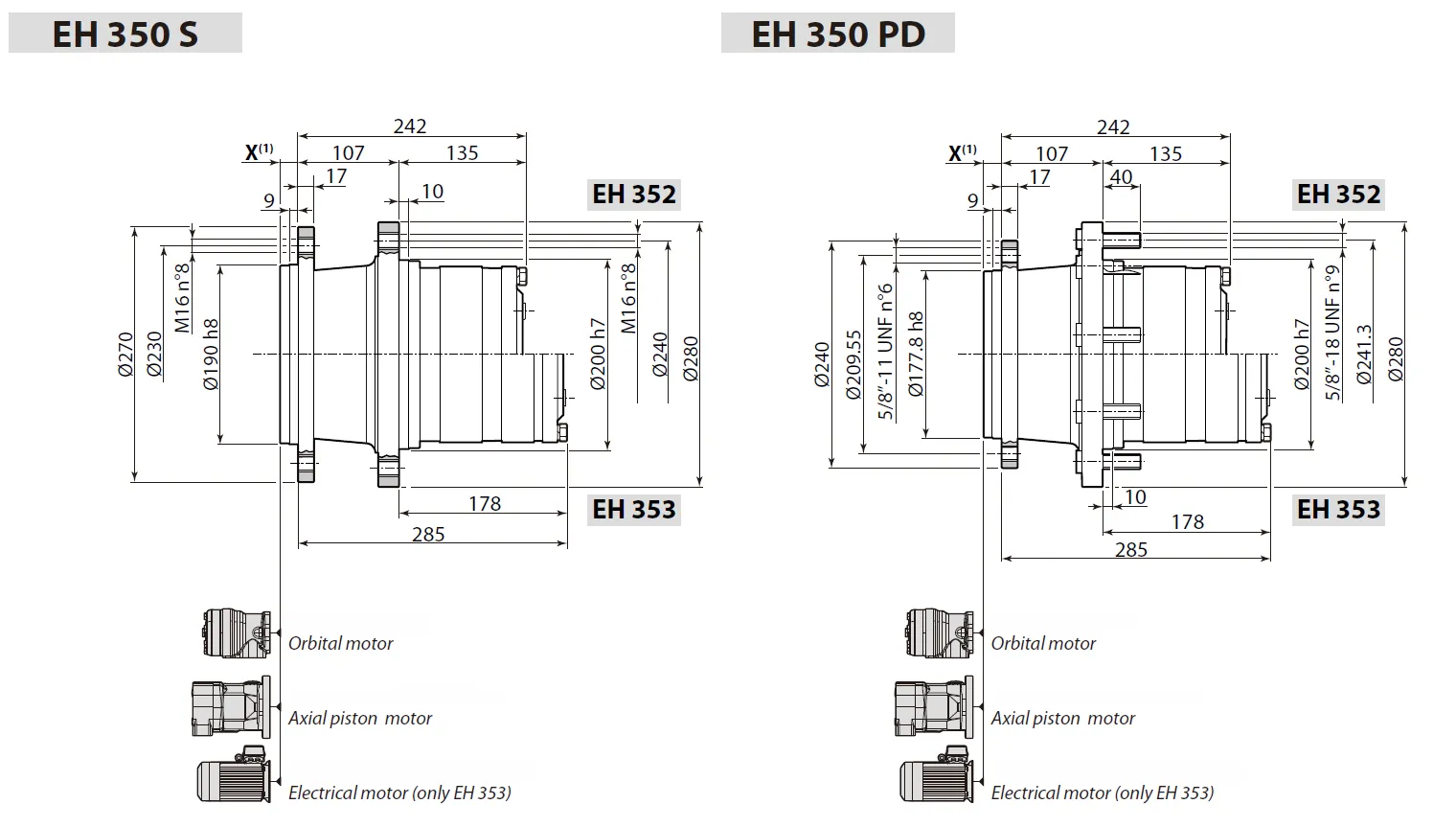
| Jenis | Berat | Jumlah minyak | i (da÷a / Dari÷ke) | T2max [Nm] | n1max [rpm] | ||||
| EH 352 | EH 353 | EH 352 | EH 353 | EH 352 | EH 353 | ||||
| EH 350 S | 55 | 60 | 1 | 1.2 | 15 ÷ 31 | 52 ÷ 135 | 7200 | 3500 | |
| EH 350 PD | |||||||||
EH 610
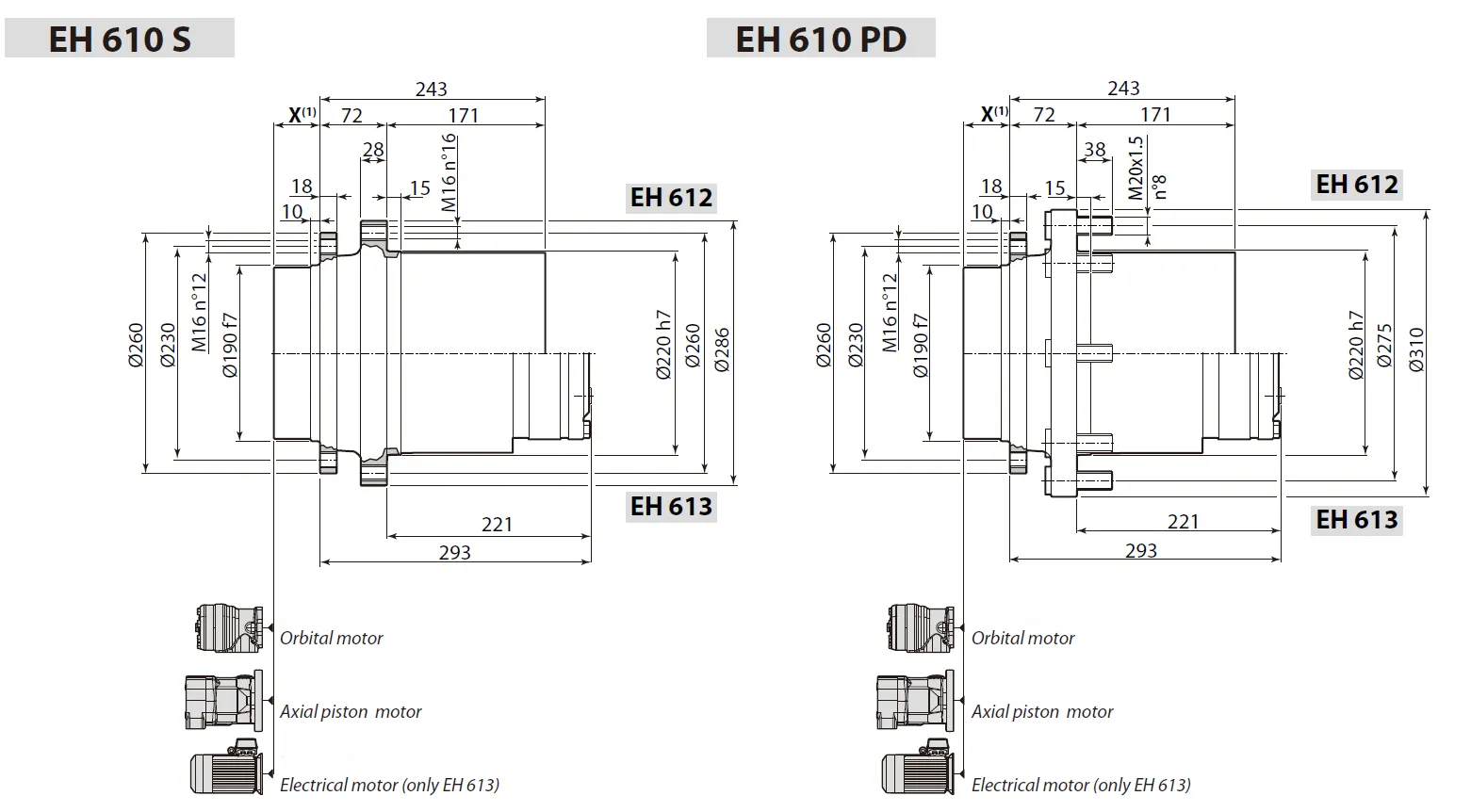
| Jenis | Berat | Jumlah minyak | i (da÷a / Dari÷ke) | T2max [Nm] | n1max [rpm] | ||||
| EH 612 | EH 613 | EH 612 | EH 613 | EH 612 | EH 613 | ||||
| EH 610 S | 60 | 70 | 1.2 | 1.5 | 12 ÷ 31 | 47 ÷ 138 | 13500 | 3500 | |
| EH 610 PD | |||||||||
EH 910
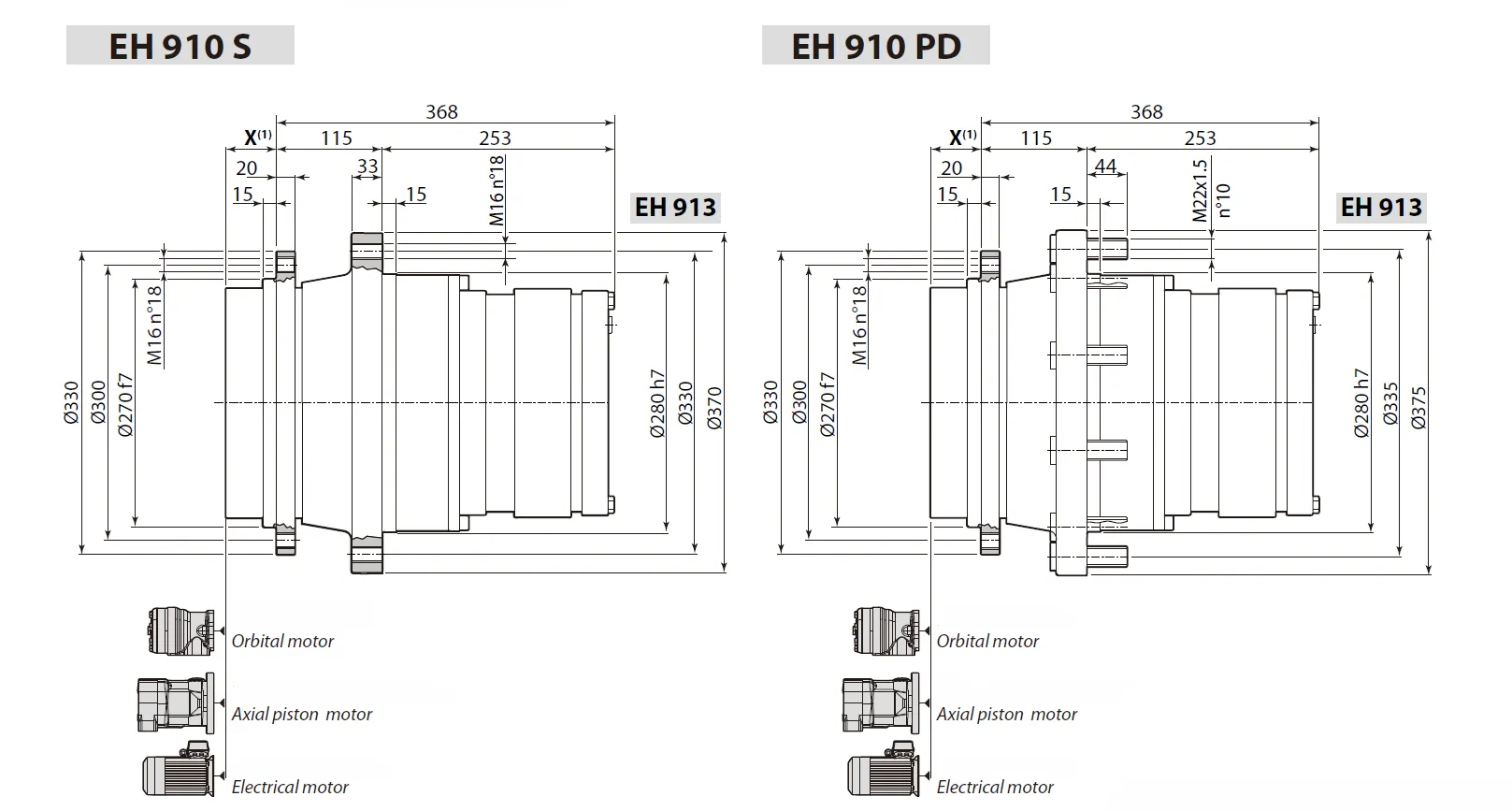
| Jenis | Berat | Jumlah minyak | i (da÷a / Dari÷ke) | T2max | n1max | |
| EH 913 | EH 913 | EH 913 | [Nm] | [rpm] | ||
| EH 910 S | 130 | 1 | 47 ÷ 131 | 24200 | 3500 | |
| EH 910 PD | ||||||
Versi S

| Ukuran | Ukuran | ||||||||||
| D1 | D2 | D3 | D4 | D5 | D6 | D7 | D8 | L1 | L2 | L3 | |
| EH 210 S | 230 | 200 | 180 jam 9 | 190 jam 9 | 210 | 229.5 | M10 n°8 | M10 n°8 | 253 | 73 | 180 |
| EH 240 S | 230 | 200 | 180 jam 9 | 190 jam 9 | 210 | 229.5 | M10 n°8 | M10 n°8 | 253 | 73 | 180 |
| EH 350 S | 270 | 230 | 190 jam 8 | 200 jam 7 | 240 | 280 | M16 n°8 | M16 n°8 | 242 | 107 | 178 |
| EH 610 S | 260 | 230 | 190 f7 | 220 jam 7 | 260 | 286 | M16 n°12 | M16 n°16 | 243 | 72 | 171 |
| EH 910 S | 330 | 300 | 270 f7 | 280 jam 7 | 350 | 370 | M16 n°18 | M16 n°18 | 368 | 115 | 253 |
Versi PD
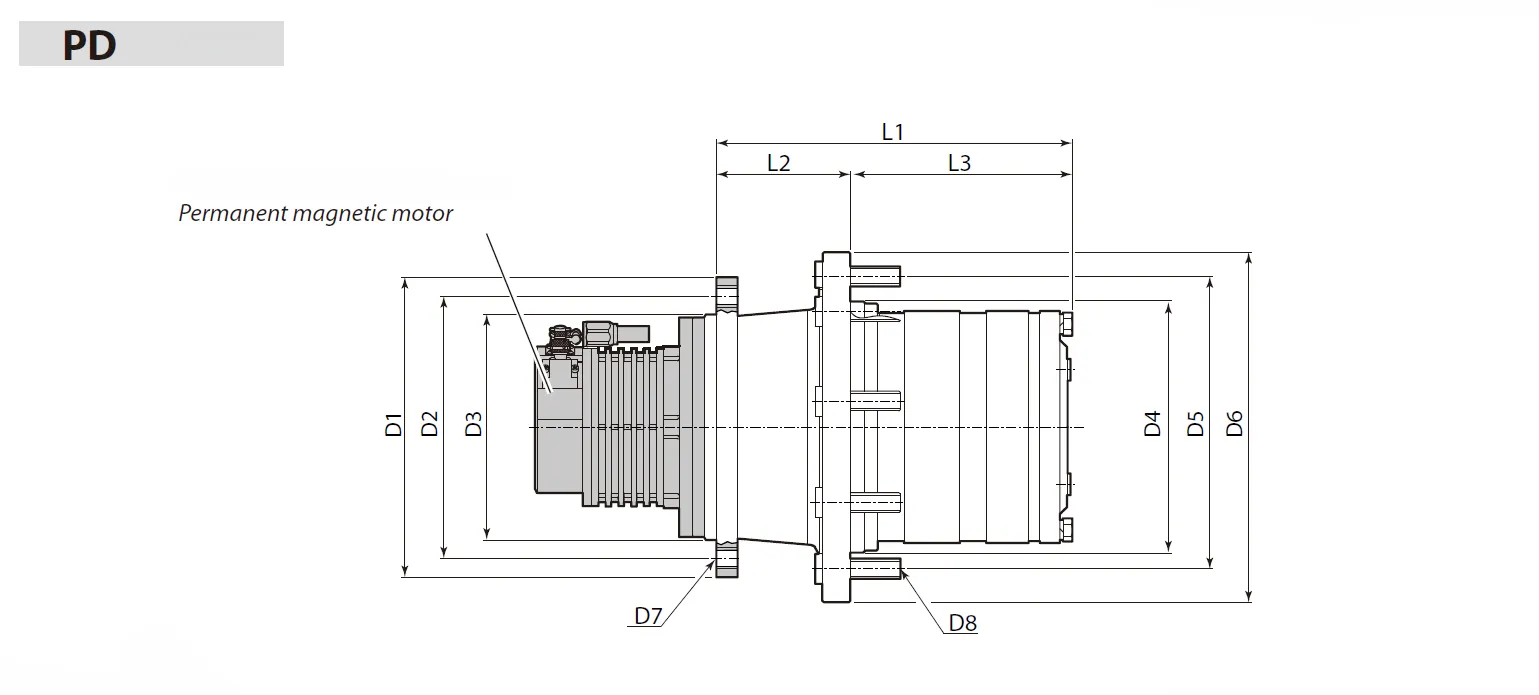
| Ukuran | Ukuran | ||||||||||
| D1 | D2 | D3 | D4 | D5 | D6 | D7 | D8 | L1 | L2 | L3 | |
| EH 210 PD | 230 | 200 | 180 jam 9 | 160,8 f8 | 205 | 240 | M10 (8x) | M18x1.5 (6x) | 210 | 140 | 70 |
| EH 240 PD | 230 | 200 | 180 jam 9 | 160,8 f8 | 205 | 240 | M10 (8x) | M18x1.5 (6x) | 210 | 140 | 70 |
| EH 350 PD | 240 | 209.55 | 177,8 jam8 | 200 jam 7 | 241.3 | 280 | 5/8"-11 UNC (6x) | 5/8"-19 UNF (9x) | 285 | 107 | 178 |
| EH 610 PD | 260 | 230 | 190 f7 | 220 jam 7 | 275 | 310 | M16 (12x) | M20x1.5 (8x) | 293 | 72 | 221 |
| EH 910 PD | 330 | 300 | 270 f7 | 280 jam 7 | 335 | 375 | M16 (18x) | M22x1.5 (10x) | 368 | 115 | 253 |
Fitur Gearbox Penggerak Roda Planet untuk Lift Boom Teleskopik
1. Kemampuan Penggandaan Torsi dan Keluaran yang Tinggi
Gearbox penggerak roda planet unggul dalam memberikan perkalian torsi yang substansial melalui konfigurasi roda gigi epikliknya, yang sangat penting untuk menggerakkan lift boom teleskopik tugas berat selama tugas pengangkatan dan penggerakan di permukaan yang menantang. Fitur ini memastikan kinerja yang andal di bawah beban tinggi, meningkatkan efisiensi operasional dalam aplikasi konstruksi dan pemeliharaan.
2. Rentang Rasio Reduksi yang Luas
Gearbox planet ini menawarkan susunan roda gigi serbaguna dengan rasio reduksi, memungkinkan penyesuaian untuk beragam kebutuhan kecepatan dan torsi pada lift boom teleskopik. Fleksibilitas tersebut mendukung berbagai penggunaan industri, mulai dari manuver kecepatan rendah yang presisi hingga perjalanan kecepatan tinggi, mengoptimalkan kemampuan adaptasi mesin di berbagai lingkungan kerja.
3. Stabilitas dan Traksi yang Lebih Baik di Medan yang Tidak Rata
Dirancang untuk diintegrasikan dengan sistem penggerak empat roda, gearbox planet penggerak roda memberikan traksi dan penanganan beban yang stabil, terutama di medan yang kasar atau miring, dengan menggabungkan poros berayun dan roda gigi reduksi planet. Hal ini berkontribusi pada pengoperasian yang lebih aman dan keseimbangan mesin yang lebih baik selama perpanjangan dan rotasi boom.
4. Konstruksi Ringkas dan Tahan Lama untuk Aplikasi Berat
Dilengkapi dengan roda gigi dan hub berkekuatan tinggi, reduktor roda gigi planet ini dirancang secara kompak untuk menahan tuntutan berat dari lift boom teleskopik, termasuk paparan kondisi ekstrem dan beban berat. Desainnya yang kokoh meminimalkan keausan, memperpanjang masa pakai, dan mendukung integrasi yang mulus ke dalam penggerak roda atau trek tanpa mengurangi ukuran keseluruhan peralatan.
5. Pengurangan Kecepatan dan Pembangkitan Gaya Putar yang Efisien
Dengan memanfaatkan sistem roda gigi planet, penggerak roda planet secara efektif mengurangi kecepatan motor roda sekaligus memperkuat gaya putar, yang sangat penting untuk pergerakan terkontrol pada platform kerja di ketinggian. Efisiensi ini menghasilkan konsumsi energi yang lebih rendah, pengurangan biaya operasional, dan kinerja yang lebih lancar pada pengaturan penggerak hidrostatis yang umum ditemukan pada lift boom.

Aplikasi Penggerak Roda Planet
1. Peralatan Konstruksi
Gearbox planet penggerak roda banyak digunakan pada mesin konstruksi seperti excavator, loader, dan lift boom teleskopik untuk memberikan torsi tinggi dan pengurangan kecepatan yang presisi untuk penggerakan di medan yang tidak rata. Desainnya yang ringkas memastikan transmisi daya yang efisien, meningkatkan stabilitas mesin dan kemampuan penanganan beban selama operasi tugas berat seperti penggalian, pengangkatan, dan pengangkutan material di lokasi kerja yang menuntut.
2. Mesin Pertanian
Dalam aplikasi pertanian, gearbox planet ini menggerakkan roda pada traktor, mesin pemanen, dan alat penyemprot, memberikan perkalian torsi yang kuat untuk menavigasi tanah lunak dan lereng sambil mempertahankan efisiensi operasional. Hal ini memfasilitasi kinerja yang andal dalam tugas pengelolaan tanaman, mengurangi waktu henti dan meningkatkan produktivitas di lahan pertanian yang luas dalam berbagai kondisi lingkungan.
3. Kendaraan Berpemandu Otomatis (AGV)
Gearbox penggerak roda planet merupakan bagian integral dari AGV di gudang dan fasilitas manufaktur, memungkinkan penggerak hub roda yang halus dan presisi tinggi untuk pengangkutan material otomatis. Gearbox ini mendukung integrasi yang ringkas dengan motor listrik, memastikan pengoperasian yang rendah kebisingan dan masa pakai yang lebih lama di lingkungan logistik yang membutuhkan mobilitas yang berkelanjutan dan andal.
4. Truk dan Bus Berat
Reducer roda gigi planet ini digunakan pada hub roda truk dan bus berat untuk mencapai amplifikasi torsi dan kontrol kecepatan yang signifikan, mengoptimalkan efisiensi bahan bakar dan penanganan di jalan raya dan rute perkotaan. Konstruksinya yang tahan lama mampu menahan beban tinggi, berkontribusi pada transportasi yang lebih aman dan ekonomis dalam armada komersial.
5. Peralatan Pertambangan dan Penggalian Tanah
Dalam operasi pertambangan, gearbox penggerak roda menggerakkan kendaraan beroda seperti truk pengangkut dan mesin bor, memberikan torsi luar biasa untuk mengangkut muatan berat di medan yang berat. Aplikasi ini meningkatkan keandalan peralatan, meminimalkan kebutuhan perawatan, dan mendukung proses ekstraksi berkelanjutan di lingkungan yang keras dan abrasif.
6. Sistem Penanganan Material
Digunakan pada forklift, konveyor, dan derek, penggerak roda planet ini memfasilitasi penggerak roda terkontrol untuk manuver dan pengangkatan yang presisi di lingkungan industri. Sistem ini menawarkan efisiensi dan kekompakan tinggi, meningkatkan alur kerja di gudang dan jalur produksi dengan memastikan pergerakan barang yang stabil dan hemat energi.
 |  |
| Penggerak Roda Planet untuk Alat Penyemprot Boom | Penggerak Roda Planet untuk Dozer Beroda |
 |  |
| Penggerak Roda Planet untuk Wheel Loader | Penggerak Roda Planet untuk Truk Pengangkut Tambang |
Proses Pembuatan Gearbox Planetary Penggerak Roda
1. Persiapan Bahan Baku
Proses manufaktur dimulai dengan pengadaan logam berkualitas tinggi seperti besi cor, baja paduan, atau baja tahan karat, diikuti oleh inspeksi kualitas yang ketat untuk menghilangkan kotoran dan pemotongan awal untuk membentuk lembaran yang mendekati bentuk dan dimensi yang dibutuhkan untuk komponen seperti pembawa planet dan roda gigi.
2. Penempaan dan Pengecoran
Komponen-komponen penting, termasuk pembawa planet, roda gigi matahari, dan cincin roda gigi bagian dalam, dibentuk melalui penempaan dengan memanaskan logam pada suhu tinggi dan menerapkan gaya penempaan atau penekanan, sedangkan pengecoran digunakan untuk struktur yang lebih besar atau rumit untuk mencapai bentuk awal yang tepat.
3. Operasi Pemesinan Kasar
Dengan menggunakan mesin perkakas CNC, benda kerja tempa atau cor menjalani proses pembubutan, penggilingan, dan pengeboran untuk menghilangkan material berlebih, sehingga terbentuk kontur dasar, fitur struktural, dan elemen-elemen seperti permukaan silinder dalam dan luar, bidang, alur pasak, dan lubang berulir untuk perakitan kotak roda gigi.
4. Perlakuan Panas Awal
Setelah proses pemesinan kasar, komponen menerima perlakuan normalisasi, anil, atau temper yang disesuaikan dengan sifat material, meningkatkan struktur logam internal, menyesuaikan kekerasan dan ketangguhan, serta mempersiapkan komponen untuk pemesinan presisi selanjutnya guna memastikan daya tahan dan kinerja.
5. Teknik Pemesinan Presisi
Komponen yang diberi perlakuan panas подвергаются proses penggerindaan, pengasahan, dan pembuatan roda gigi dengan metode hobbing, di mana roda gigi planet dibentuk melalui hobbing, shaving, atau slotting, dan pembawa (carrier) menjalani penggerindaan dan perataan presisi untuk memenuhi profil gigi, akurasi, dan standar kekasaran permukaan yang tepat.
6. Perlakuan Panas Sekunder
Untuk meningkatkan ketahanan aus di area yang mengalami tekanan tinggi seperti roda gigi, dilakukan pendinginan karburisasi, nitridasi, atau pengerasan permukaan, yang mencegah keausan dini dan kegagalan kelelahan selama pengoperasian yang lama dalam aplikasi penggerak roda yang menuntut.
7. Pemesinan Presisi Akhir dan Inspeksi Kualitas
Penggilingan, pemolesan, dan metode ultra-presisi lebih lanjut menyempurnakan roda gigi dan bagian-bagian penting untuk akurasi dan kualitas permukaan yang unggul, diikuti oleh inspeksi komprehensif termasuk pemeriksaan dimensi, pengujian kekerasan, dan metode non-destruktif seperti pengujian partikel magnetik atau ultrasonik untuk mendeteksi cacat seperti retakan atau inklusi.
8. Perakitan dan Pengujian Kinerja
Komponen yang telah dibersihkan dilumasi dengan oli atau gemuk khusus dan dirakit sesuai spesifikasi desain untuk memastikan persambungan roda gigi dan pemasangan segel yang tepat, yang berpuncak pada fase pengujian ketat yang meliputi pengujian tanpa beban, simulasi beban, kebisingan, getaran, dan evaluasi kinerja keseluruhan untuk memastikan stabilitas jangka panjang dalam kondisi operasional.

Informasi Tambahan
| Diedit oleh | Yjx |
|---|
























