
Caja de engranajes planetarios de giro para manipuladores telescópicos
La caja de engranajes planetarios de giro para manipuladores telescópicos es un sistema de transmisión sofisticado y compacto, diseñado para ofrecer un alto par motor y un control de rotación preciso en equipos móviles de servicio pesado. Diseñada específicamente para manipuladores telescópicos giratorios, esta caja de engranajes de giro emplea una configuración de engranajes planetarios multietapa que generalmente incluye un engranaje solar central, varios engranajes planetarios y una corona dentada exterior para lograr una transmisión de potencia y una reducción de velocidad eficientes, incluso al manejar cargas radiales y axiales considerables.
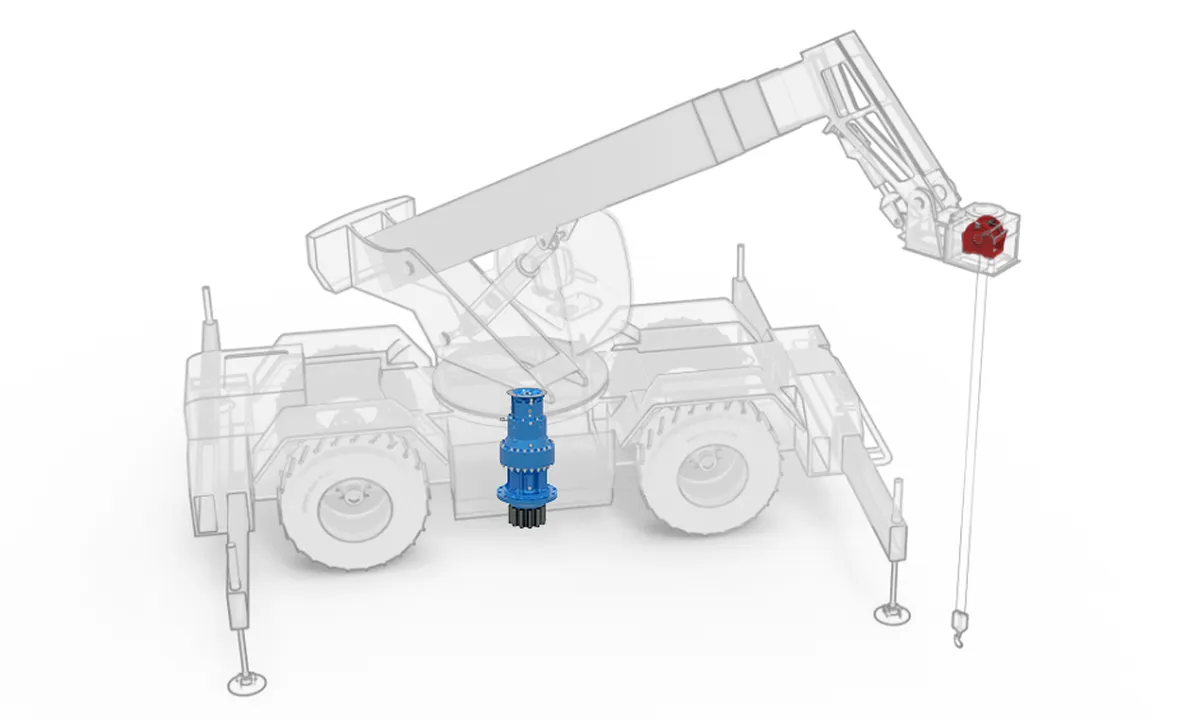
La caja de engranajes planetarios de giro para manipuladores telescópicos es un sistema de transmisión sofisticado y compacto, diseñado para ofrecer un par motor elevado y un control de rotación preciso en maquinaria móvil de alta resistencia. Específicamente adaptada para manipuladores telescópicos giratorios, esta caja de engranajes de giro emplea una configuración de engranajes planetarios multietapa que generalmente incluye un engranaje solar central, varios engranajes planetarios y una corona dentada exterior para lograr una transmisión de potencia y una reducción de velocidad eficientes, incluso con cargas radiales y axiales considerables. Integrada con un rodamiento de corona de giro, permite una rotación fluida de 360 grados de la superestructura superior del manipulador telescópico con respecto al chasis, lo que mejora la flexibilidad operativa en aplicaciones de construcción, agrícolas e industriales.
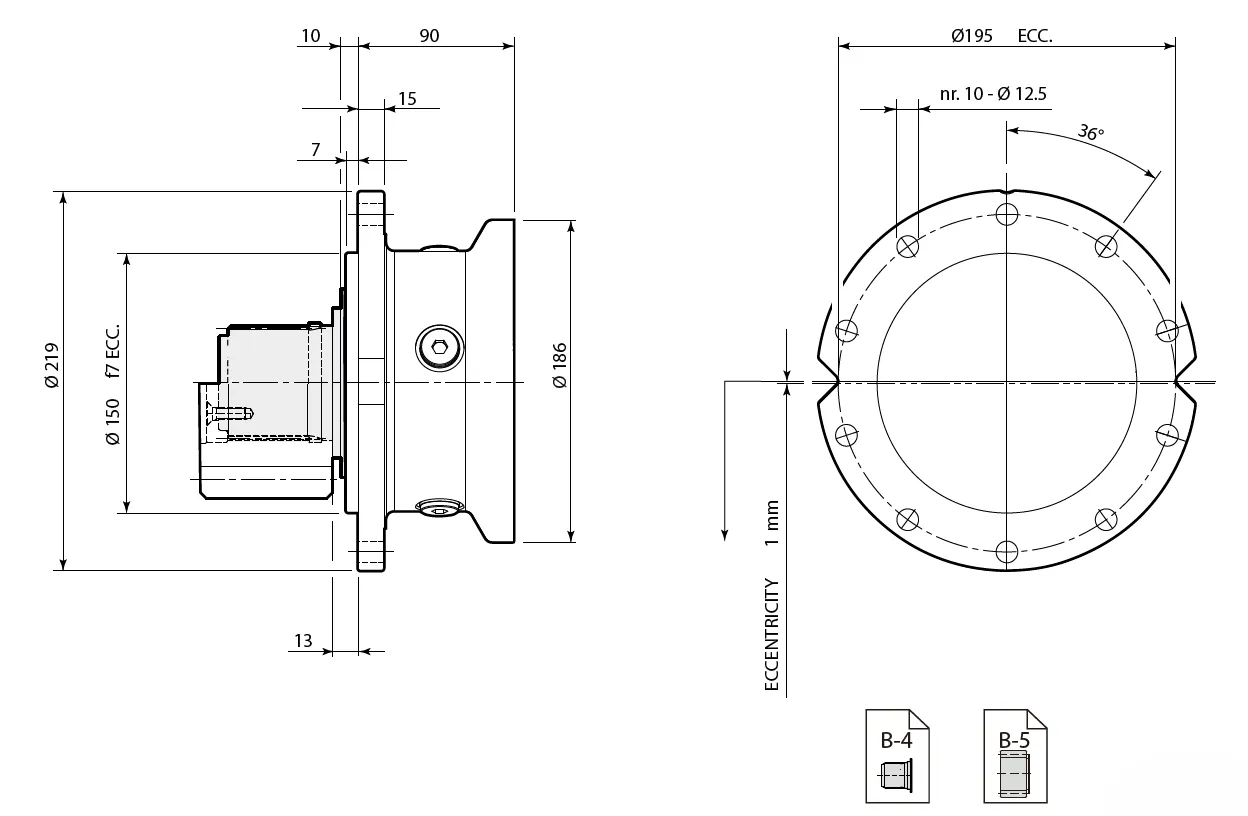
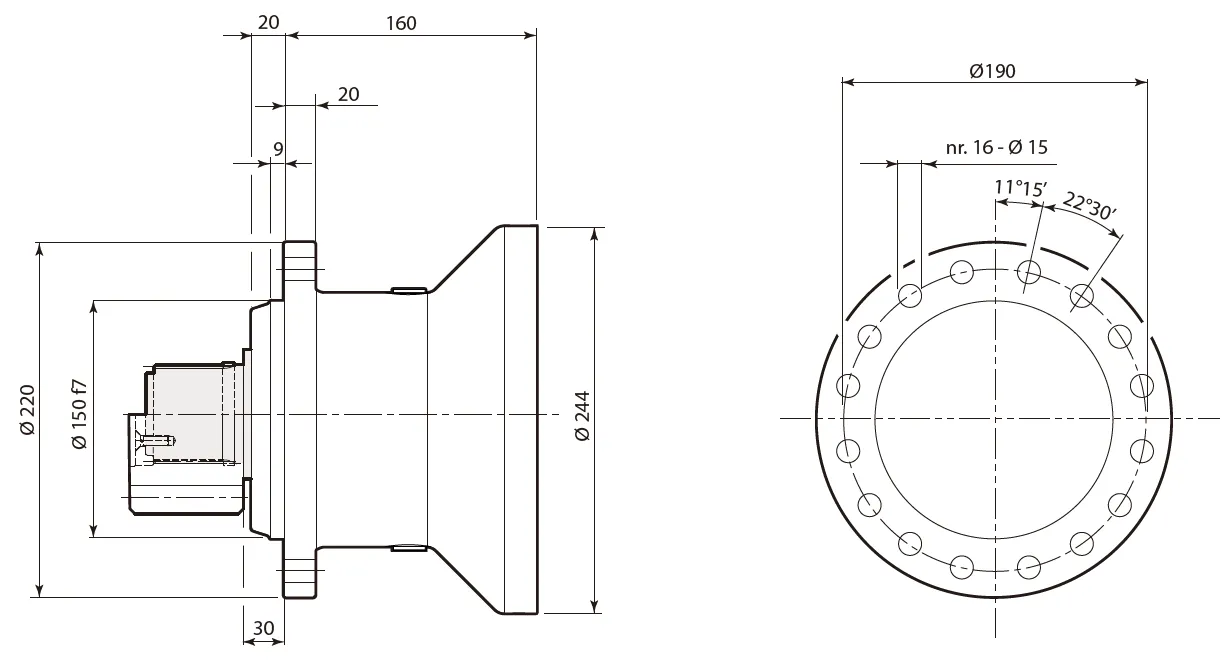
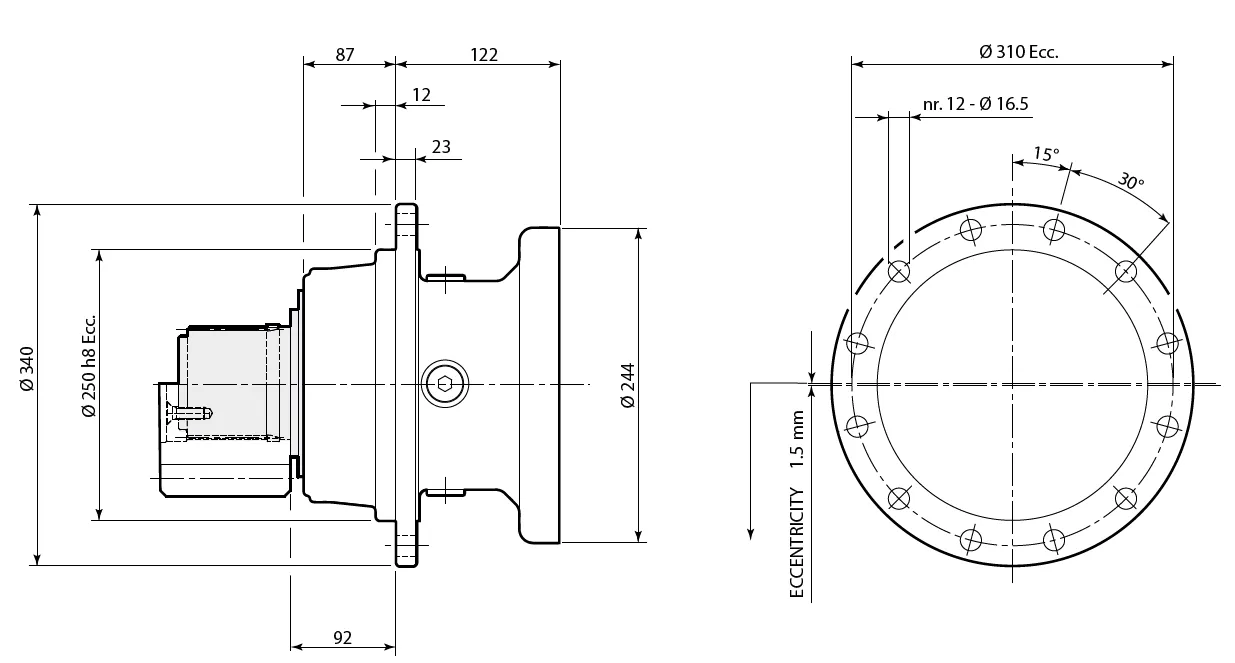
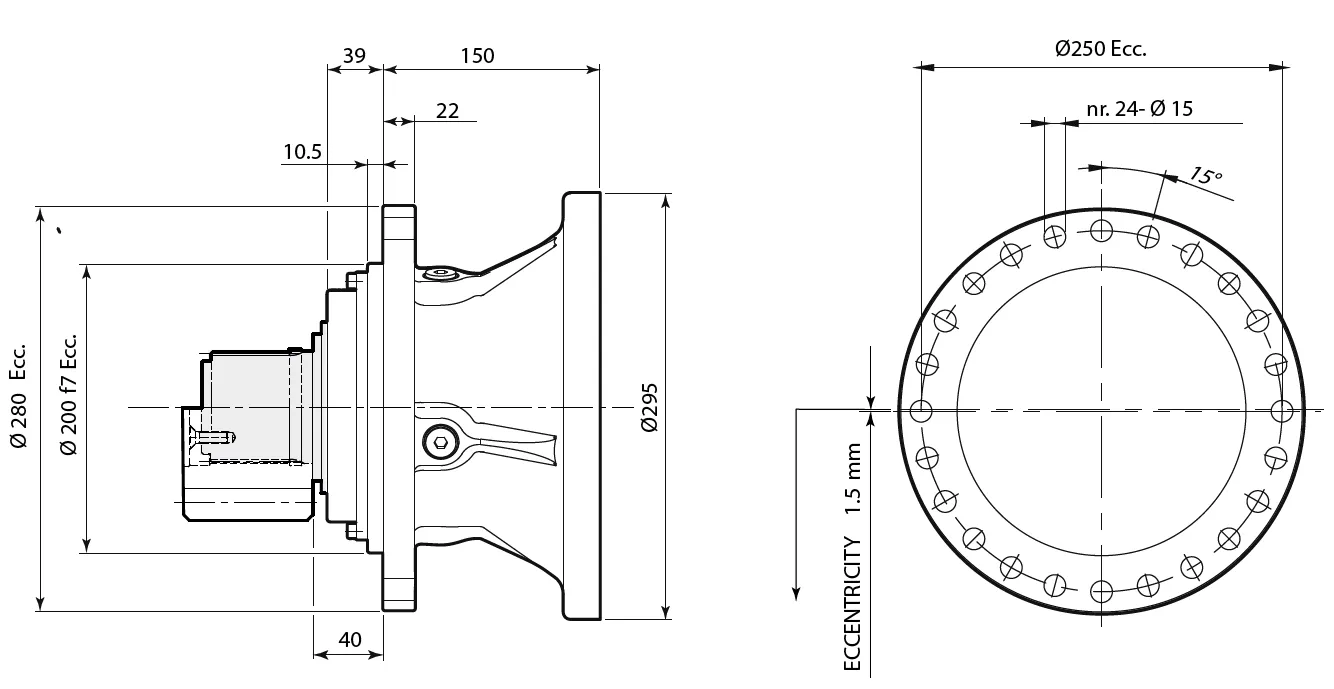
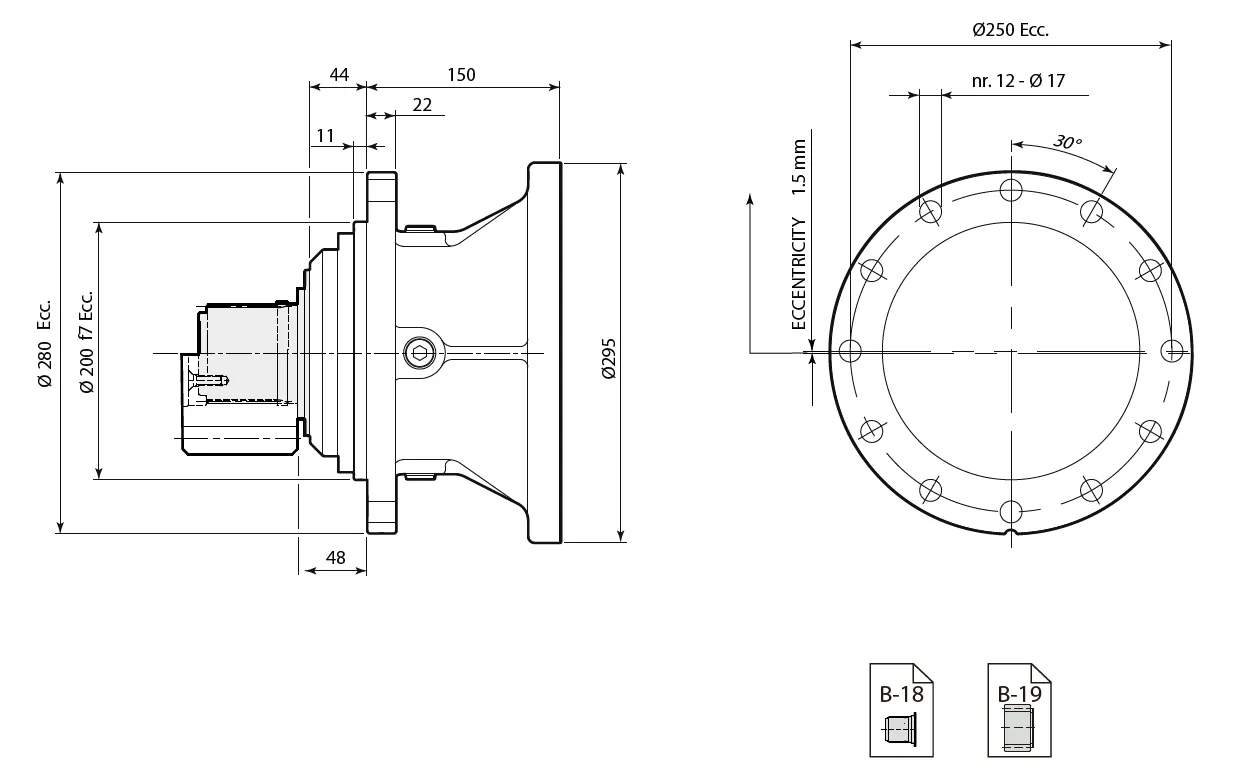
Dimensiones del accionamiento de giro planetario
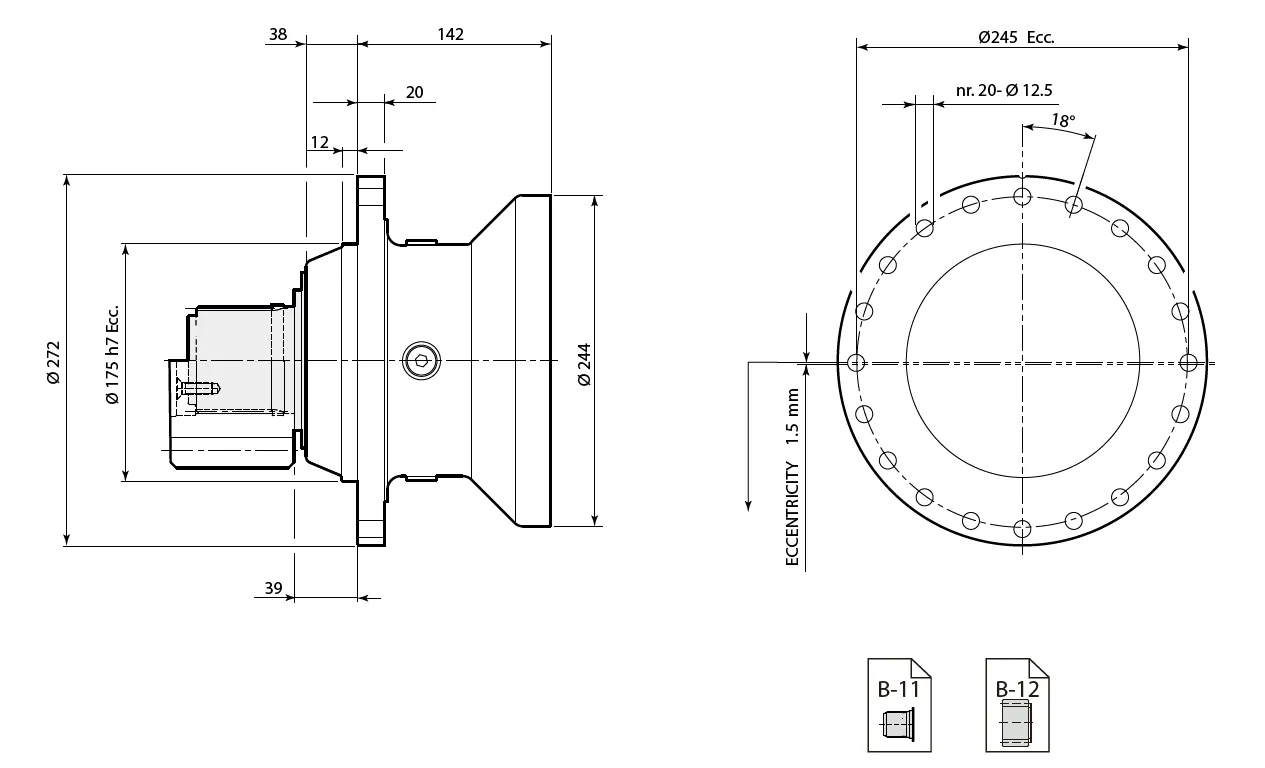
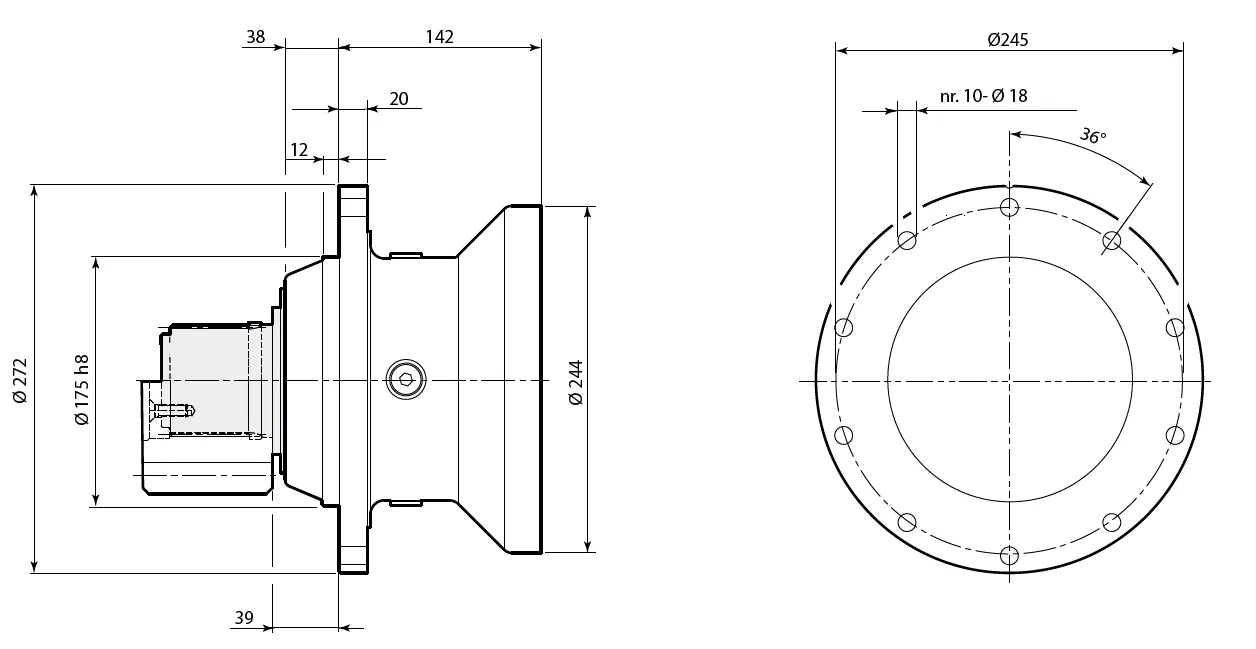
RE 240
Soporte: DBS

Soporte: Tecc
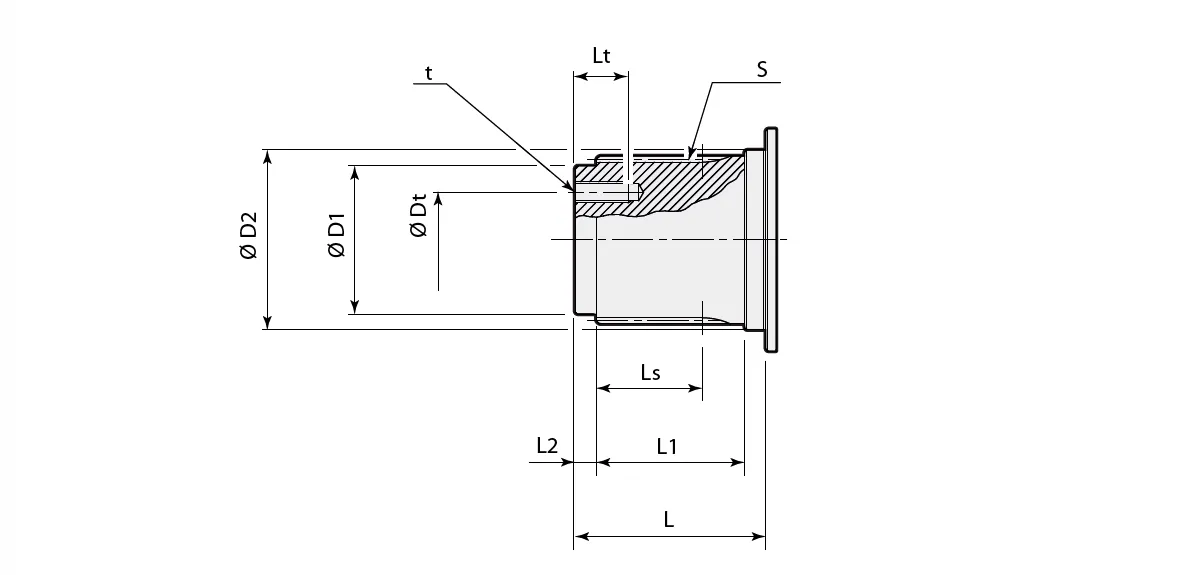
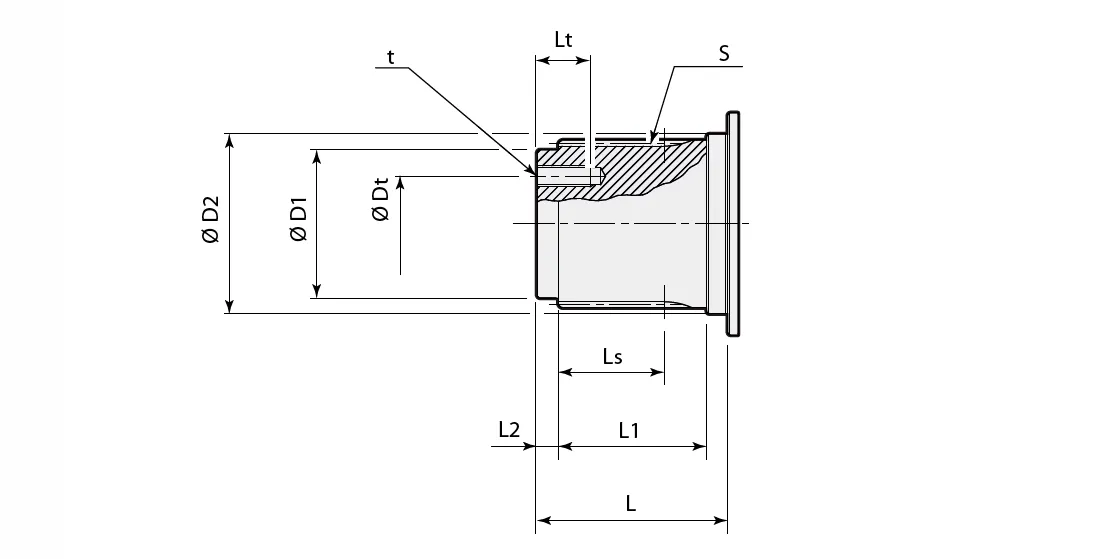
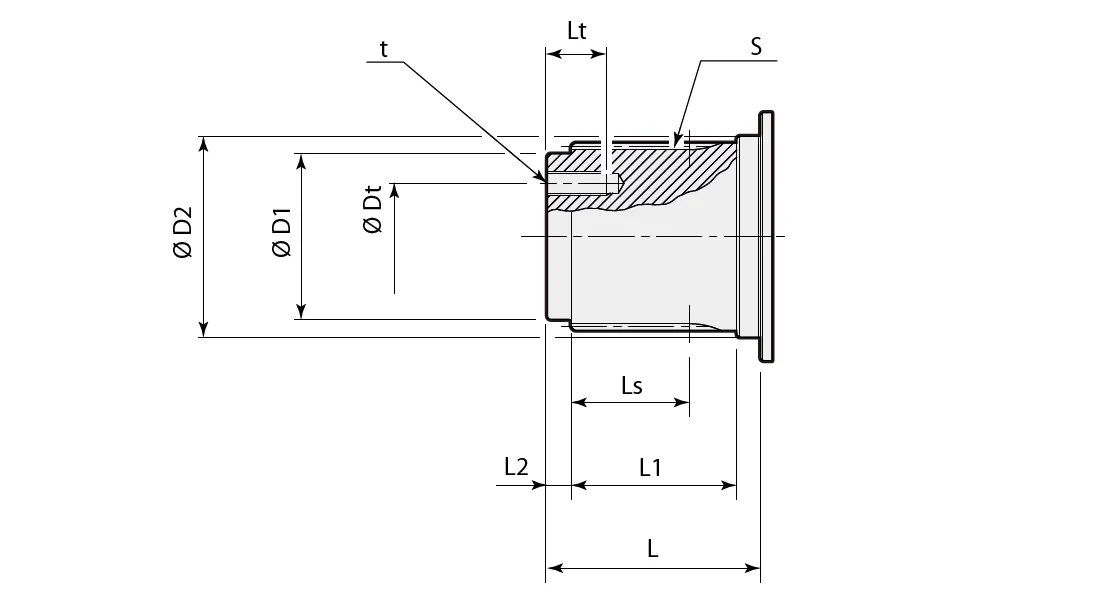
Eje estriado:
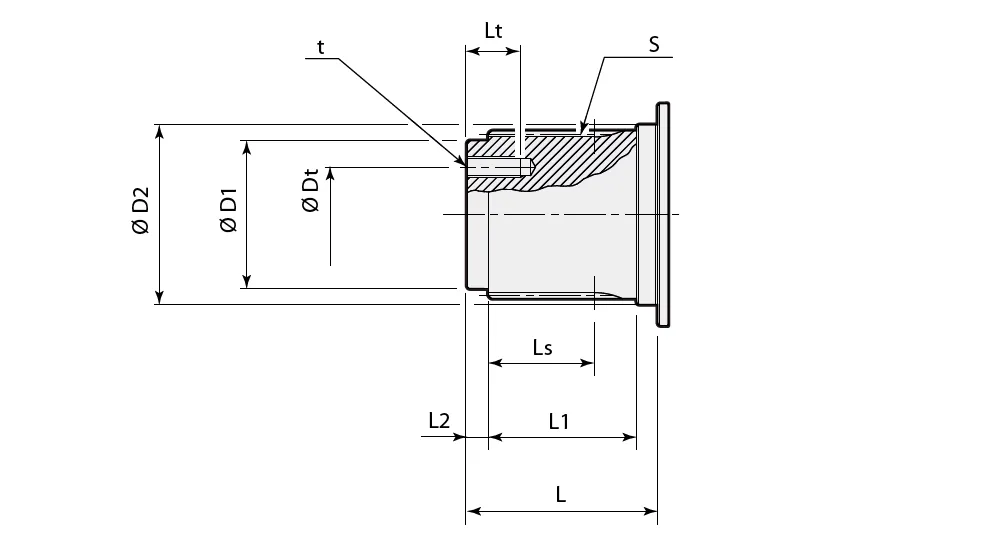
| Soporte Apoyo | ØD1 | ØD2 | S | Ls | Yo | L1 | L2 | el | ØDt | Teniente |
| [ mm ] | ||||||||||
| DBS | 50 h7 | 60 h6 | DIN5482 B58x53 | 37 | 68.3 | 50 | 8 | M10 (n.° 3) | 32 | 21 |
| Tecnología | 50 h7 | 60 h6 | DIN5482 B58x53 | 37 | 68.3 | 50 | 8 | M10 (n.° 3) | 32 | 21 |
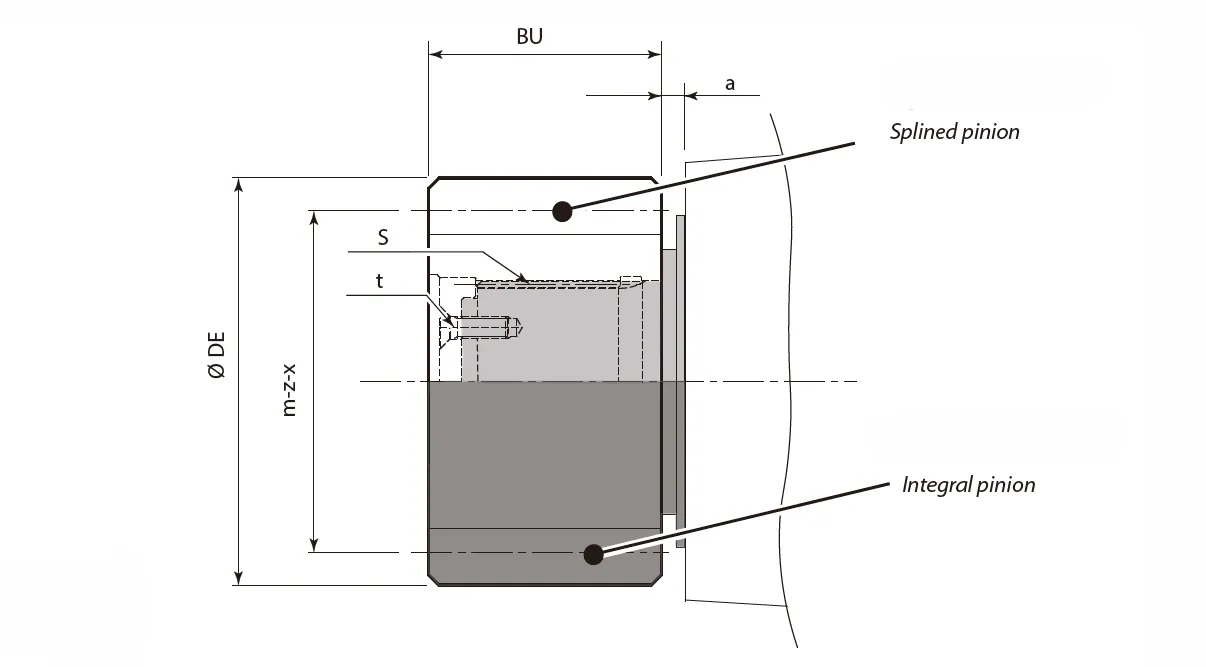
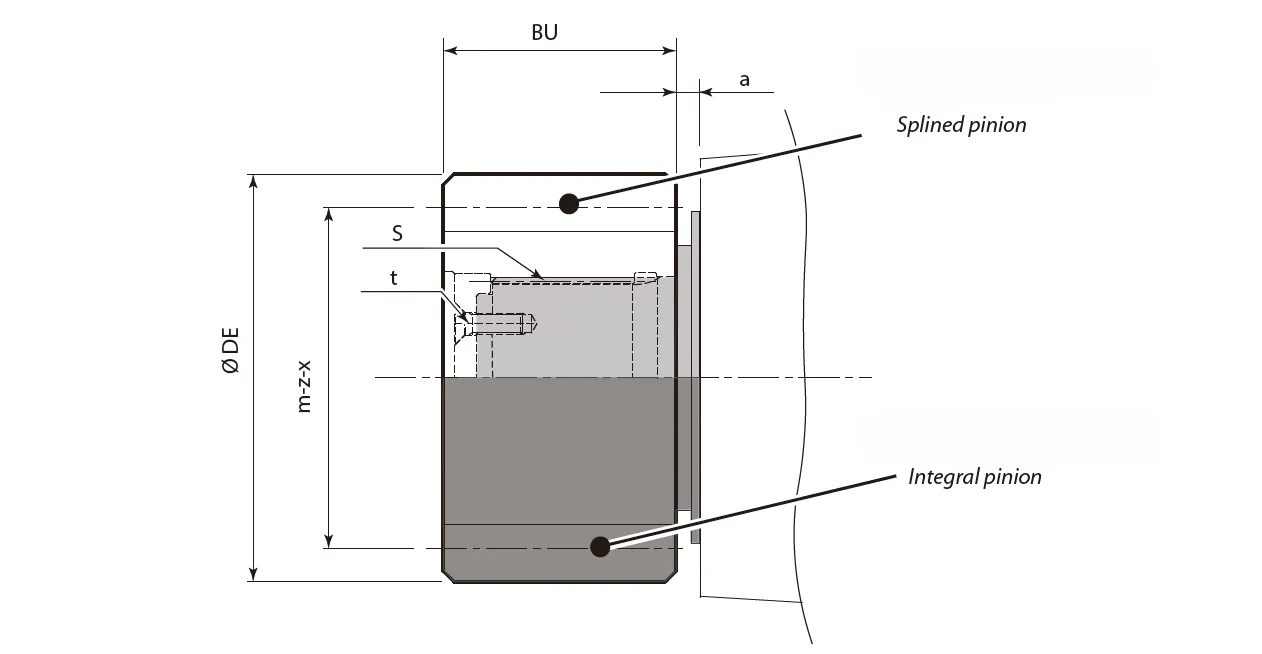
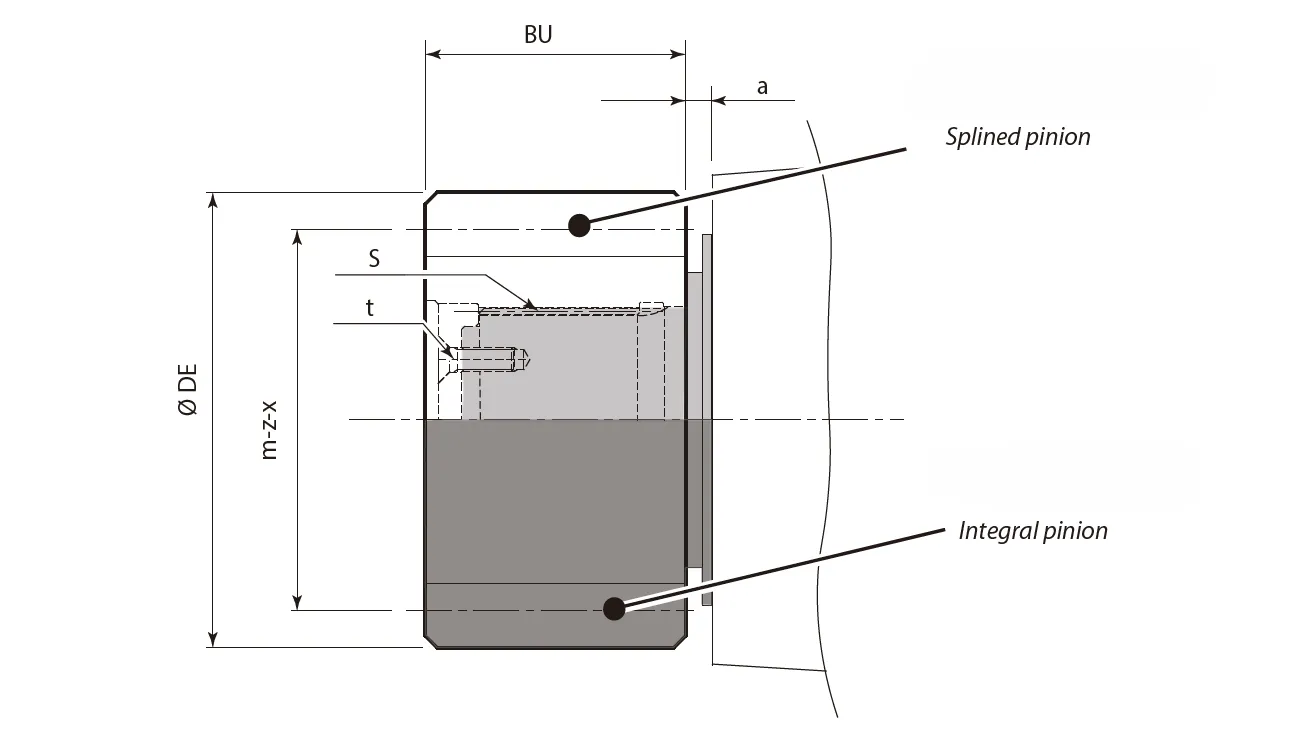
Piñones:
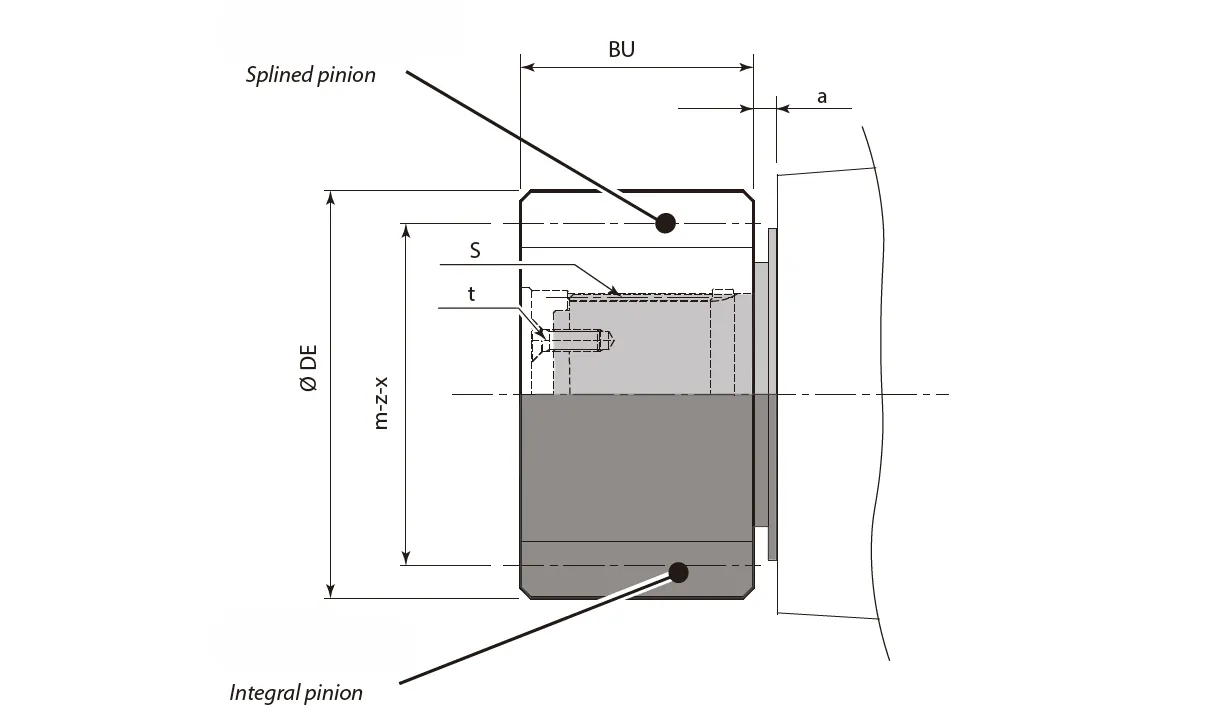
| Apoyo | metro | z | incógnita | ODA | BU | a | S | el | Tmáx | |
| [mm] | Estático [Nuevo Méjico] | Dinámica [Nuevo Méjico] | ||||||||
| DBS | 6 | 15 | 0.5 | 108 | 88 | 2 | - | - | 6000 | 5400 |
| 8 | 9 | 0.5 | 95.2 | 96 | 0.5 | - | - | 5000 | 4500 | |
| 10 | 11 | 0.5 | 137 | 68 | 2 | - | - | 6300 | 5670 | |
| 14 | 13 | 0.5 | 224 | 70 | 2 | DIN5482 B58x53 | M10 (n.° 3) | 6300 | 5670 | |
| Tecnología | 6 | 18 | 0 | 120 | 70 | 13.5 | DIN5482 B58x53 | M10 (n.° 3) | 6000 | 5400 |
| 8 | 10 | 0.5 | 104 | 80 | 13.5 | - | - | 5000 | 4500 | |
| 8 | 14 | 0.5 | 136 | 80 | 23.5 | DIN5482 B58x53 | M10 (n.° 3) | 6300 | 5670 | |
| 10 | 13 | 0 | 150 | 80 | 3.5 | DIN5482 B58x53 | M10 (n.° 3) | 6300 | 5670 | |
| 14 | 13 | 0,5 | 224 | 70 | 2 | DIN5482 B58x53 | M10 (n.° 3) | 6500 | 5670 | |
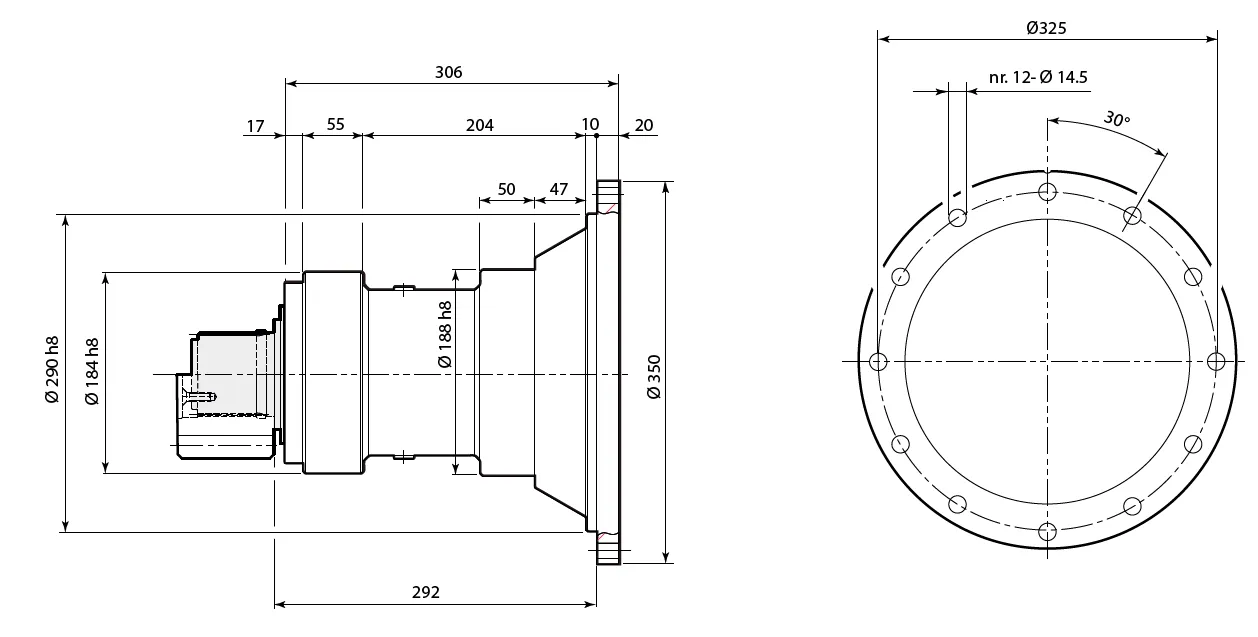
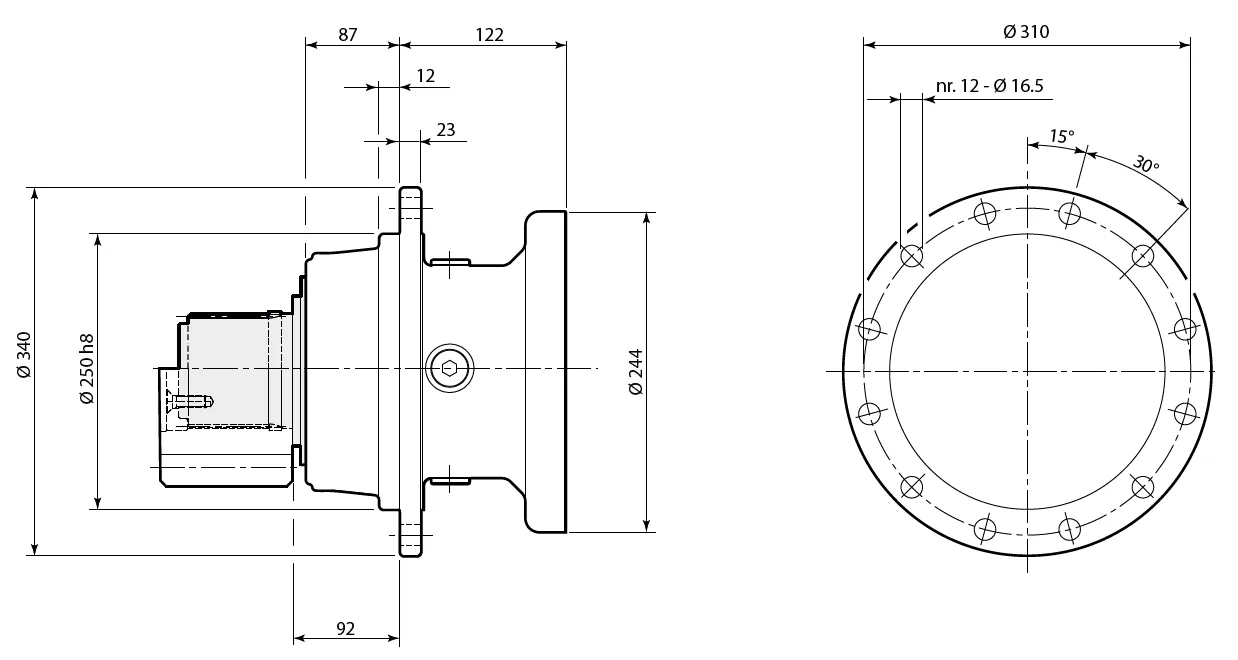
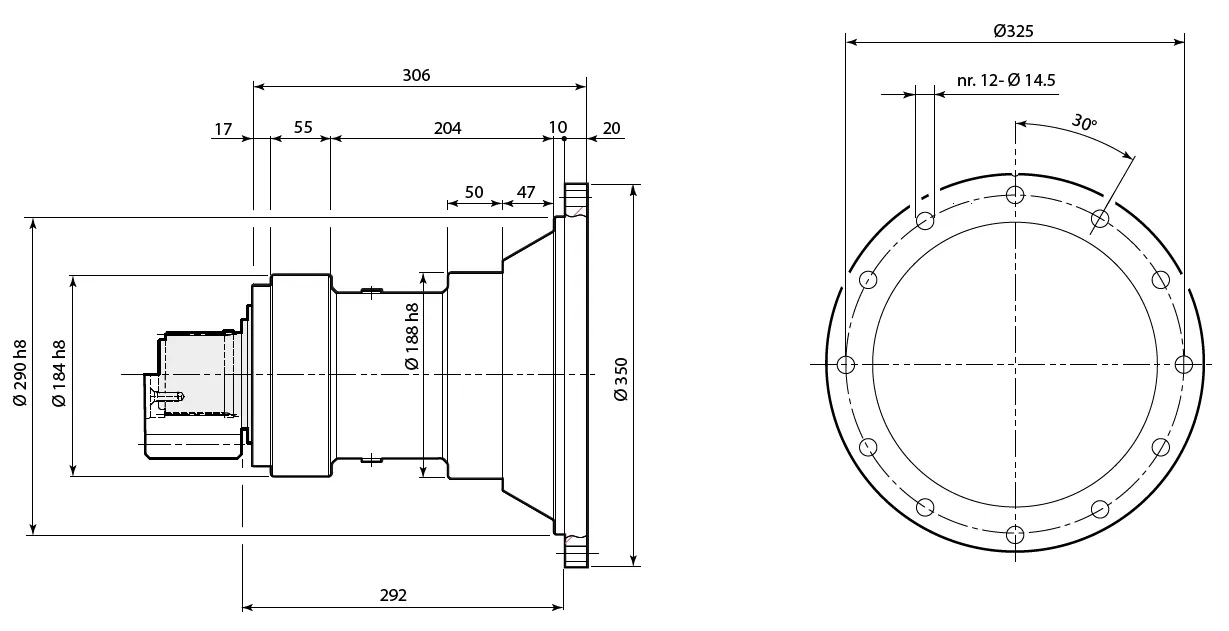
RE 310/510
Soporte: DBS
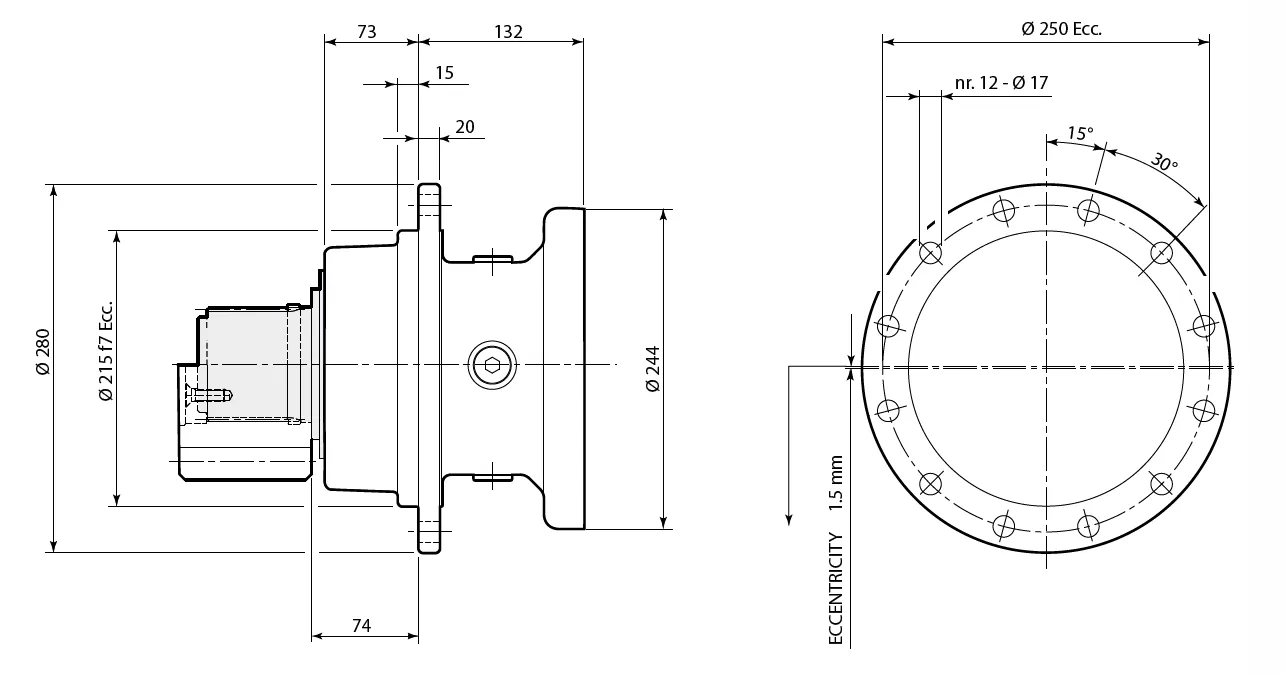
Soporte: Tecc
Soporte: T6
Soporte: T8

Soporte: T18
Soporte: NR
Soporte: NR3
Eje:
| Apoyo | ØD1 | ØD2 | S | Ls | Yo | L1 | L2 | el | ØDt | Teniente |
| [ mm ] | ||||||||||
| DBS | 50 h7 | 60 h6 | DIN5482 B58x53 | 46 | 78 | 60 | 8 | M10 (n.° 3) | 32 | 20 |
| Tecnología | 50 h7 | 60 h6 | DIN5482 B58x53 | 46 | 78 | 60 | 8 | M10 (n.° 3) | 32 | 20 |
| T6 | 50 h7 | 60 h6 | DIN5482 B58x53 | 46 | 78 | 60 | 8 | M10 (n.° 3) | 32 | 20 |
| T8 | 50 h7 | 60 h6 | DIN5482 B58x53 | 46 | 78 | 60 | 8 | M10 (n.° 3) | 32 | 20 |
| T18 | 62 F7 | 72 F7 | DIN5482 B70x64 | 51 | 90 | 70 | 10 | M10 (n.° 3) | 40 | 22 |
| NR | 50 h7 | 60 h6 | DIN5482 B58x53 | 37 | 68.5 | 50 | 8 | M10 (n.° 3) | 32 | 20 |
| NR3 | 50 h7 | 60 h6 | DIN5482 B58x53 | 37 | 68.5 | 50 | 8 | M10 (n.° 3) | 32 | 20 |
Piñones:
| Apoyo | metro | z | incógnita | ODA | BU | a | S | el | Tmáx | |
| [mm] | Estático [Nuevo Méjico] | Dinámica [Nuevo Méjico] | ||||||||
| DBS | 8 | 11 | 0.5 | 112.2 | 78 | 7 | - | - | 10500 | 9450 |
| 9 | 13 | 0.5 | 144 | 75 | 7 | - | - | 10500 | 9450 | |
| 10 | 11 | 0.5 | 137 | 78 | 7 | - | - | 10500 | 9450 | |
| 10 | 15 | 0 | 170 | 90 | 10 | - | - | 10500 | 9450 | |
| 12 | 10 | 0.5 | 155 | 95 | 7 | - | - | 10500 | 9450 | |
| 12 | 11 | 0.5 | 166.8 | 80 | 7 | - | - | 10500 | 9450 | |
| Tecnología | 6 | 13 | 0.65 | 97.2 | 65 | 27 | - | - | 6900 | 6210 |
| 8 | 11 | 0.5 | 111.2 | 88 | 4 | - | - | 8300 | 7470 | |
| 8 | 15 | 0 | 136 | 75 | 11 | DIN5482 B58x53 | M10 (n° 3) | 10400 | 9360 | |
| 10 | 10 | 0.5 | 130 | 90 | 3 | - | - | 9500 | 8550 | |
| 14 | 14 | 0.5 | 236.6 | 100 | 1 | DIN5482 B58x53 | M10 (n° 3) | 10500 | 9450 | |
| T6 T8 | 10 | 13 | 0.6 | 161 | 86 | 17 | - | - | 10500 | 9450 |
| 10 | 14 | 0.5 | 168 | 80 | 2.5 | - | - | 10500 | 9450 | |
| 10 | 12 | 0.55 | 150.5 | 93 | 3 | - | - | 10500 | 9450 | |
| 12 | 10 | 0.5 | 155 | 108 | 5.5 | - | - | 10500 | 9450 | |
| T18 | 8 | 14 | 0 | 128 | 79.5 | 16 | DIN5482 B70x64 | M10 (n.° 3) | 10500 | 9450 |
| 10 | 14 | 0.32 | 166.4 | 90 | 15 | 13200 | 11880 | |||
| 12 | 13 | 0.5 | 192 | 80 | 21 | 13200 | 11880 | |||
| 14 | 15 | 0.5 | 250.6 | 105 | 6 | 13200 | 11880 | |||
| NR NR3 | 5 | 22 | 0 | 120 | 50 | 27.5 | DIN5482 B58x53 | M10 (n° 3) | 9250 | 8325 |
| 8 | 11 | 0.5 | 110.8 | 79 | 10.5 | - | - | 9250 | 8325 | |
| 8 | 16 | 0.5 | 149.5 | 73 | 20.5 | - | - | 9250 | 8325 | |
| 10 | 11 | 0.5 | 139 | 100 | 12 | - | - | 9250 | 8325 | |
| 10 | 12 | 0.5 | 149 | 90 | 19.5 | - | - | 9250 | 8325 | |
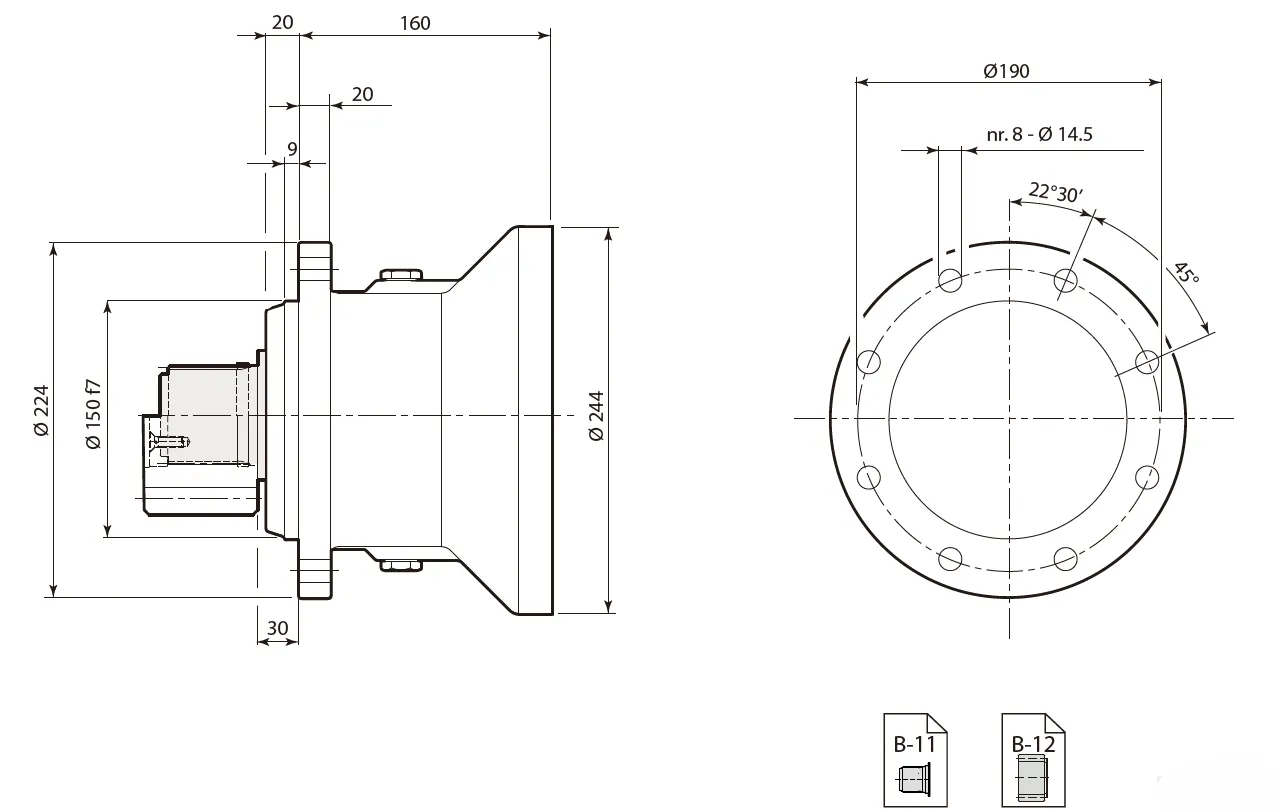
RE 610
Soporte: DBS
Soporte: DBS2
Soporte: T18
Eje:
| Apoyo | ØD1 | ØD2 | S | Ls | Yo | L1 | L2 | el | ØDt | Teniente |
| [ mm ] | ||||||||||
| DBS | 62 h7 | 72 h6 | DIN5482 B70x64 | 51 | 90 | 70 | 10 | M10 (n.° 3) | 40 | 22 |
| DBS2 | 62 h7 | 72 h6 | DIN5482 B70x64 | 51 | 90 | 70 | 10 | M10 (n.° 3) | 40 | 22 |
| T18 | 62 f7 | 72 f7 | DIN5482 B70x64 | 51 | 90 | 70 | 10 | M10 (n.° 3) | 40 | 22 |
Piñones:
| Apoyo | metro | z | incógnita | ODA | BU | a | S | el | Tmáx | |
| [mm] | Estático [Nuevo Méjico] | Dinámica [Nuevo Méjico] | ||||||||
| DBS DBS2 | 8 | 14 | 0 | 128 | 79.5 | 15 | DIN 5482 B70x64 | M10 (n° 3) | 17500 | 15750 |
| 10 | 12 | 0.5 | 150 | 78 | 5 | - | - | 21500 | 19350 | |
| 10 | 13 | 0.5 | 160 | 85 | 19 | DIN 5482 B70x64 | M10 (n° 3) | 21000 | 18900 | |
| 10 | 14 | 0.5 | 170 | 90 | 5 | - | - | 24000 | 21600 | |
| 12 | 10 | 0 | 144 | 100 | 5 | - | - | 18500 | 16650 | |
| 12 | 12 | 0.5 | 180 | 100 | 5 | DIN 5482 B70x64 | M10 (n° 3) | 24000 | 21600 | |
| 12 | 14 | 0.5 | 204 | 105 | 5 | - | - | 24000 | 21600 | |
| 14 | 11 | 0.5 | 194.6 | 105 | 4 | - | - | 24000 | 21600 | |
| T18 | 8 | 20 | 0 | 176 | 115 | 15 | DIN 5482 B70x64 | M10 (n° 3) | 14500 | 13050 |
| 10 | 11 | 0.681 | 141 | 85 | 6 | - | - | 12000 | 10800 | |
| 12 | 10 | 0.5 | 156 | 120 | 6 | - | - | 12000 | 10800 | |
| 12 | 11 | 0.525 | 168.61 | 110 | 6 | - | - | 13500 | 12150 | |
RE 810
Soporte: Tecc
Soporte: TRecc
Eje:
| Apoyo | ØD1 | ØD2 | S | Ls | Yo | L1 | L2 | el | ØDt | Teniente |
| [ mm ] | ||||||||||
| Tecnología | 62 f7 | 72 f7 | DIN5482 B70x64 | 51 | 90 | 70 | 10 | M10 (n.° 3) | 40 | 22 |
| TRecc | ||||||||||
Piñones:
| Apoyo | metro | z | incógnita | ODA | BU | a | S | el | Tmáx | |
| [mm] | Estático [Nuevo Méjico] | Dinámica [Nuevo Méjico] | ||||||||
| Tecnología | 8 | 14 | 0 | 128 | 79.5 | 11.5 | DIN 5482 B70x64 | M10 (n° 3) | 10500 | 9450 |
| 9 | 15 | 0 | 152.64 | 101 | 6.5 | - | - | 12500 | 11250 | |
| 10 | 14 | 0.5 | 169 | 90 | 1.5 | DIN 5482 B70x64 | M10 (n.° 3) | 14500 | 13050 | |
| 12 | 13 | 0.5 | 192 | 95 | 32.5 | 13500 | 12150 | |||
| 14 | 15 | 0.5 | 250.6 | 105 | 1.5 | 21000 | 18900 | |||
| TRecc | 8 | 15 | 0.3 | 140 | 80 | 13.5 | DIN 5482 B70x64 | M10 (n° 3) | 15200 | 13680 |
| 10 | 13 | 0.5 | 160 | 90 | 5.5 | - | - | 17800 | 16020 | |
| 10 | 18 | 0 | 198 | 80 | 5.5 | - | - | 23800 | 21420 | |
| 12 | 12 | 0.5 | 180 | 100 | 3.5 | DIN 5482 B70x64 | M10 (n.° 3) | 19000 | 17100 | |
| 12 | 14 | 0.5 | 199 | 100 | 33.5 | 16000 | 14400 | |||
Ventajas de la caja de engranajes de giro planetario para manipuladores telescópicos
- Alto par de salida
Las cajas de engranajes planetarios para el giro están diseñadas para ofrecer un par excepcional, lo que las hace ideales para manipular cargas pesadas en manipuladores telescópicos. Gracias a su sistema de engranajes planetarios multietapa, distribuyen la carga de manera uniforme entre varios engranajes, lo que garantiza una transmisión de potencia fiable y reduce el desgaste de los componentes, prolongando así su vida útil. - Diseño compacto y ligero
A pesar de su alto rendimiento, estas cajas de engranajes de giro presentan un diseño compacto y ligero, lo que facilita su integración en manipuladores telescópicos. Su arquitectura que ahorra espacio optimiza el tamaño total del equipo sin comprometer la funcionalidad, lo que hace que los manipuladores telescópicos sean más eficientes y fáciles de maniobrar en entornos de construcción, agrícolas o industriales con espacio reducido. - Capacidad de rotación de 360 grados
Integrados con un rodamiento de anillo giratorio, estos accionamientos de giro planetario permiten una rotación fluida de 360 grados de la superestructura de la manipuladora telescópica con respecto a su chasis. Esta característica mejora la flexibilidad operativa, permitiendo que las manipuladoras telescópicas realicen tareas que requieren un posicionamiento preciso, como levantar y girar cargas pesadas, con mayor eficiencia y facilidad. - Rendimiento duradero y fiable
Diseñados para soportar condiciones de trabajo extremas, los reductores planetarios de giro son altamente duraderos. Su robusta construcción, combinada con materiales de alta calidad, garantiza resistencia a cargas radiales y axiales elevadas, vibraciones y entornos adversos. Esta durabilidad asegura un rendimiento constante en aplicaciones exigentes, reduciendo el tiempo de inactividad y los costos de mantenimiento. - Transmisión de potencia eficiente
El diseño de engranajes planetarios multietapa garantiza una transferencia de potencia eficiente al optimizar el par motor y reducir la pérdida de energía. Esta eficiencia se traduce en un funcionamiento más suave, un menor consumo de combustible o energía y un mejor rendimiento general de las manipuladoras telescópicas, lo que las hace más rentables y respetuosas con el medio ambiente a lo largo de su vida útil. - Versatilidad en diversas aplicaciones
Las cajas de engranajes planetarios de giro son versátiles y adecuadas para una amplia gama de aplicaciones en manipuladores telescópicos. Ya sea en la construcción, la agricultura o entornos industriales, estas cajas de engranajes proporcionan la precisión, el control y la resistencia necesarios para realizar diversas tareas, como levantar, girar o estabilizar cargas, garantizando así la máxima productividad y adaptabilidad.

Aplicaciones comunes de los sistemas de giro planetario
- Manipuladores telescópicos y grúas
Los sistemas de giro planetario se utilizan ampliamente en manipuladores telescópicos y grúas para permitir la rotación de 360 grados de sus superestructuras. Esta funcionalidad permite un posicionamiento y movimiento precisos de cargas pesadas, garantizando un funcionamiento eficiente en los sectores de la construcción, la logística y la industria, donde la elevación y rotación de materiales son fundamentales para la productividad. - Plataformas elevadoras de trabajo (AWP)
Las plataformas elevadoras, como las plataformas telescópicas y las grúas de brazo, utilizan engranajes planetarios para una rotación suave y controlada. Esto garantiza que los operarios puedan posicionar la plataforma de forma segura y precisa en diferentes ángulos y alturas, lo que hace que estos engranajes sean indispensables para tareas de mantenimiento, inspección y construcción en obras en altura. - Excavadoras y maquinaria para movimiento de tierras
En las excavadoras y otras máquinas de movimiento de tierras, las cajas de engranajes de giro proporcionan el movimiento de rotación para los brazos excavadores o las cucharas. Su capacidad para soportar un par motor y cargas significativas garantiza una excavación, apertura de zanjas y manipulación de materiales eficientes, incluso en entornos difíciles como operaciones mineras o proyectos de construcción pesada. - Aerogeneradores
Las cajas de engranajes planetarios de giro se utilizan en las turbinas eólicas para ajustar la orientación de las palas (sistemas de guiñada) y optimizar la captación de energía. Estos sistemas soportan cargas elevadas a la vez que proporcionan un control de rotación preciso, lo que garantiza que la turbina funcione de manera eficiente en diversas condiciones de viento y contribuye a la producción de energía renovable. - Equipos marinos y de alta mar
Los sistemas de giro son esenciales para grúas marinas, plataformas de perforación en alta mar y otros equipos marítimos. Su diseño robusto garantiza un rendimiento fiable en entornos marinos adversos, proporcionando la potencia de rotación necesaria para el izaje, el anclaje y otras operaciones, a la vez que resisten la corrosión y las cargas pesadas. - Sistemas de seguimiento solar
En los sistemas de energía solar fotovoltaica y de concentración, se utilizan reductores de velocidad planetarios para ajustar el ángulo de los paneles solares o los espejos. Al permitir una rotación precisa y seguir el movimiento del sol, estos sistemas maximizan la eficiencia y la producción de energía, lo que los convierte en elementos esenciales para las soluciones modernas de energía renovable.
 |  |
| Accionamiento de giro planetario para grúas torre | Accionamiento de giro planetario para grúas pesqueras |
 | |
| Accionamiento de giro planetario para plataformas de perforación sobre orugas | Accionamiento de giro planetario para sistemas de seguimiento solar |
Elija la caja de engranajes planetarios de giro adecuada para manipuladores telescópicos.
- Evaluar la capacidad de carga
Al seleccionar una caja de engranajes planetarios para manipuladores telescópicos, es fundamental evaluar las cargas axiales, radiales y de momento que debe soportar, ya que estas determinan su capacidad para soportar cargas pesadas durante las operaciones de elevación y extensión sin fallar. Considere la capacidad máxima de elevación y la extensión de la pluma del manipulador telescópico para garantizar que la caja de engranajes pueda soportar las tensiones dinámicas propias de la construcción o la manipulación de materiales. - Evaluar los requisitos de par
Determine el par motor requerido en función de las necesidades operativas de la manipuladora telescópica, incluyendo los niveles de par máximo y continuo necesarios para una rotación suave bajo cargas variables. Este factor garantiza un rendimiento fiable en tareas como el posicionamiento de materiales pesados, evitando sobrecargas y prolongando la vida útil del mecanismo de giro en aplicaciones exigentes. - Considere la velocidad de rotación.
Analice la velocidad de rotación necesaria para el mecanismo de giro, asegurándose de que el sistema de transmisión planetaria proporcione las relaciones de engranajes adecuadas para un movimiento controlado y eficiente sin un desgaste excesivo. En las manipuladoras telescópicas, la velocidad óptima facilita las maniobras precisas en espacios reducidos, equilibrando la productividad con la seguridad durante los trabajos en altura o la navegación en obra. - Analizar el entorno operativo
Tenga en cuenta las condiciones ambientales, como temperaturas extremas, polvo, humedad y elementos corrosivos, a las que estará expuesta la caja de engranajes planetarios en entornos exteriores o industriales. La elección de diseños sellados y robustos mejora la durabilidad y minimiza el mantenimiento de las manipuladoras telescópicas utilizadas en entornos agrícolas o de construcción exigentes. - Revisión de la relación de transmisión y la eficiencia
Analice la relación de transmisión para que se ajuste a las necesidades de potencia de entrada y salida de la manipuladora telescópica, priorizando los modelos de alta eficiencia para reducir el consumo de energía y la generación de calor durante un uso prolongado. Esto garantiza una integración perfecta con accionamientos hidráulicos o eléctricos, optimizando el rendimiento general de la máquina y los costos operativos. - Garantizar la compatibilidad y el montaje.
Verifique las dimensiones de la caja de engranajes, las interfaces de montaje y su integración con el chasis y el sistema de transmisión de la manipuladora telescópica para garantizar un ajuste seguro y minimizar las modificaciones. Una compatibilidad adecuada evita problemas de alineación, mejora la estabilidad y facilita la instalación en diversos modelos de manipuladoras telescópicas.

Información adicional
| Editado por | Yjx |
|---|
Productos relacionados
-

Caja de engranajes de transmisión planetaria para excavadoras
-

Caja de engranajes de transmisión planetaria para cargadoras
-

Caja de engranajes de transmisión planetaria para camiones volquete
-

Caja de engranajes de transmisión planetaria para grúas sobre orugas
-

Caja de engranajes de transmisión planetaria para apisonadoras



















