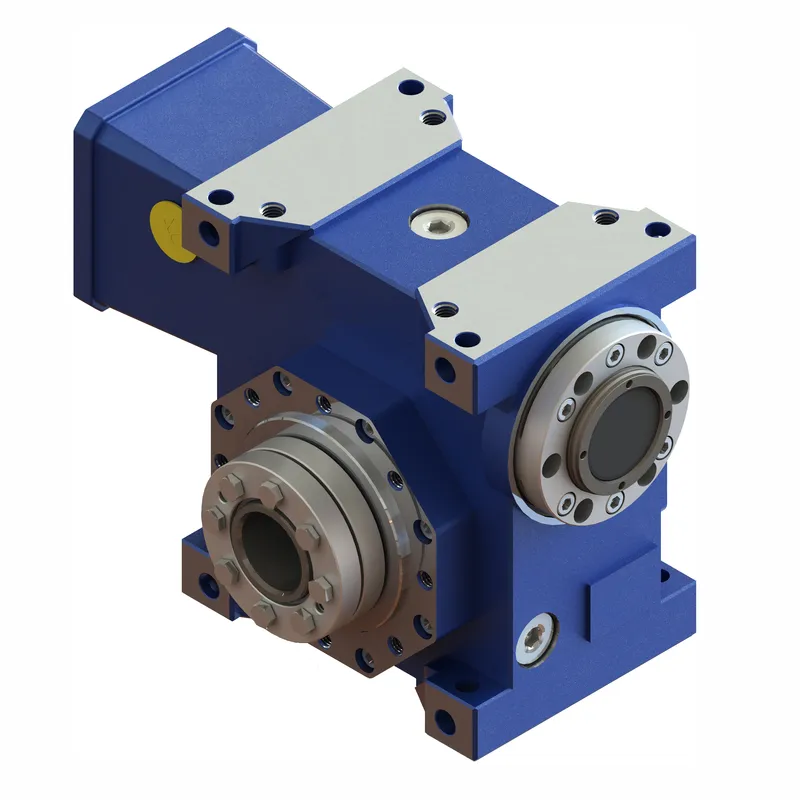
Hochpräzisions-Schneckengetriebe der JDLB-Serie
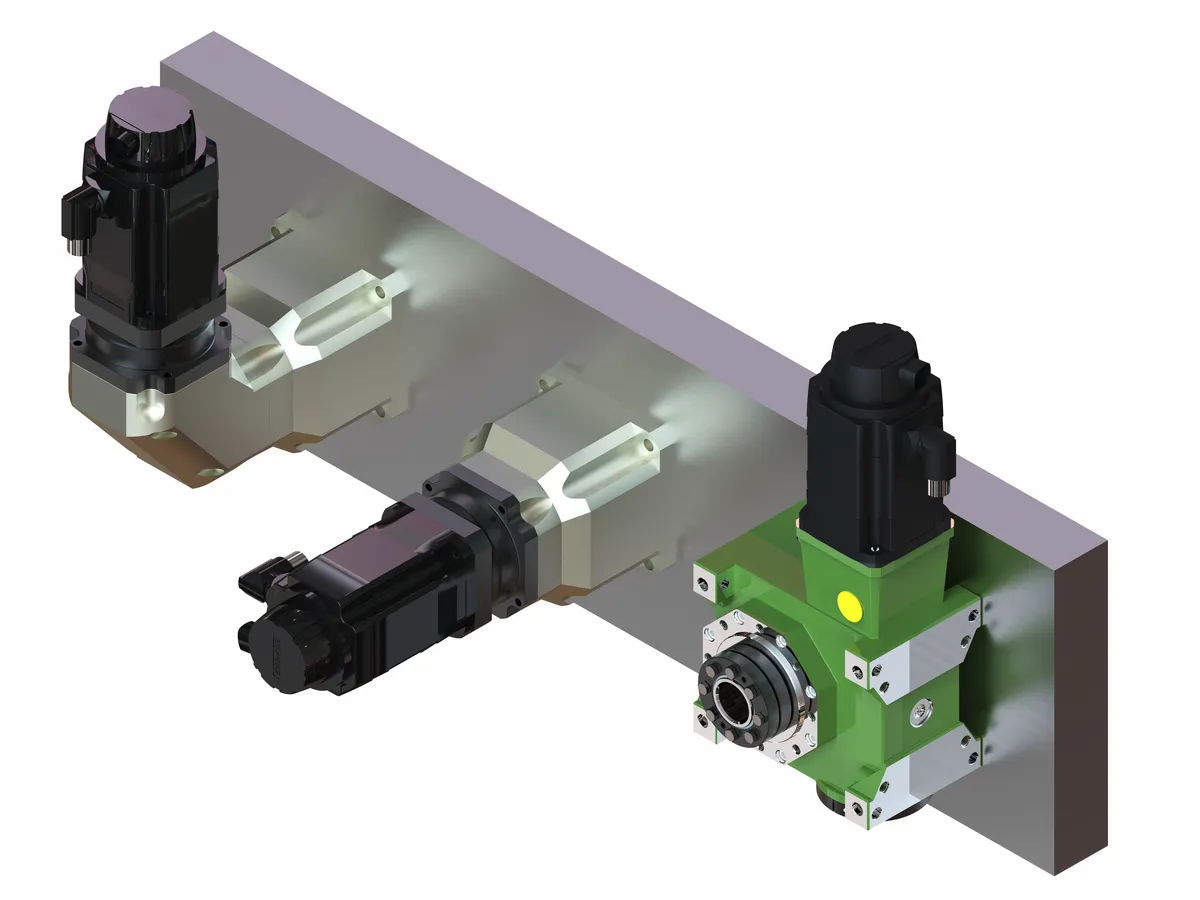
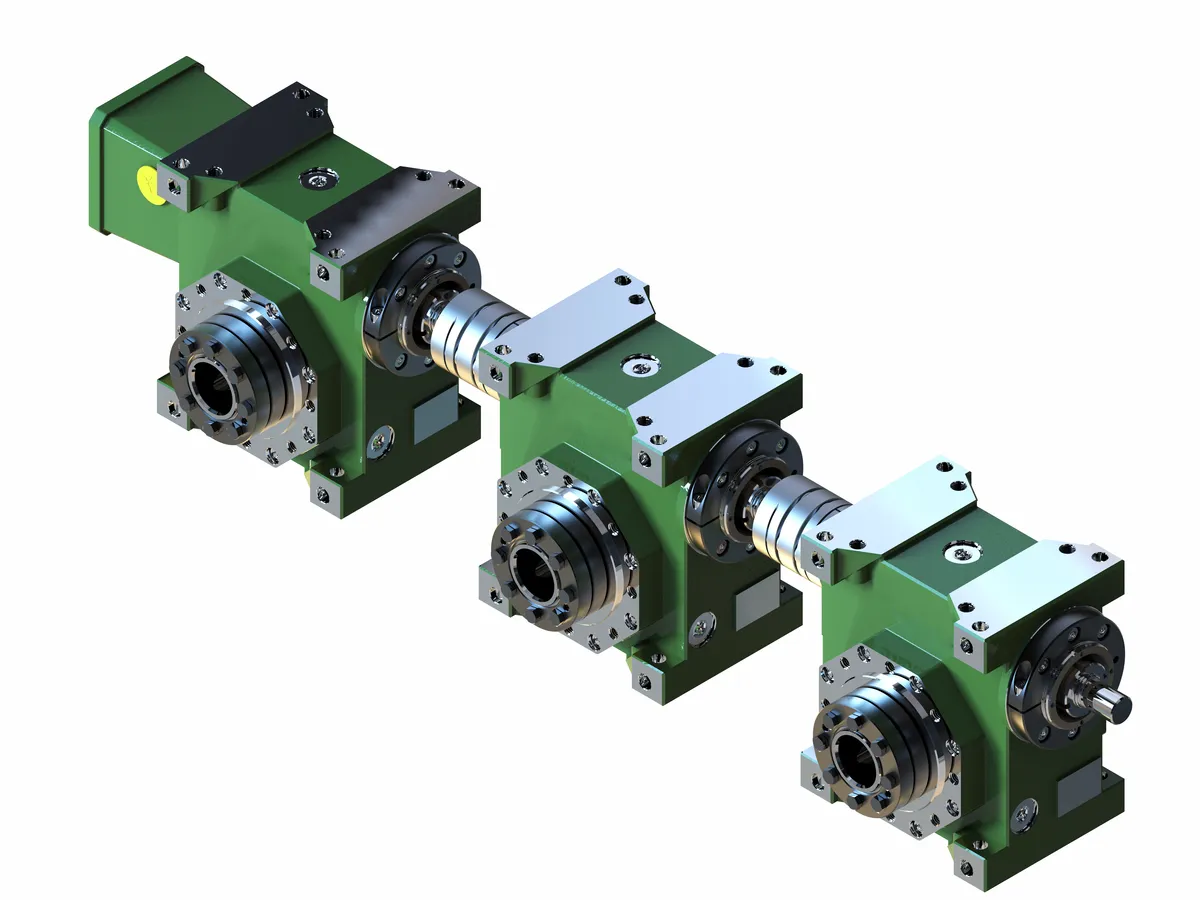
Das hochpräzise Schneckengetriebe der JDLB-Serie ist ein idealer Ersatz für Präzisionsplanetengetriebe in der industriellen Automatisierung und verwandten Bereichen und kann die Anwendungskosten im Vergleich zu diesen Getrieben drastisch senken. Zudem ermöglicht es die 90°-Drehung des Getriebes zur Installation eines Servosystems. Der Schneckenantrieb kann in Reihe mit einem Servomotor geschaltet werden, um den synchronen Ausgang mehrerer Schneckenräder zu realisieren. Diese JDLB-Schneckengetriebe eignen sich für den Einsatz in Bearbeitungsanlagen der Elektronik-, Kommunikations- und anderer Industrien.
Das hochpräzise Schneckengetriebe der JDLB-Serie ist ein idealer Ersatz für Präzisionsplanetengetriebe in der industriellen Automatisierung und verwandten Bereichen und kann die Anwendungskosten im Vergleich zu diesen Getrieben drastisch senken. Zudem ermöglicht es die 90°-Drehung des Getriebes zur Installation eines Servosystems. Der Schneckenantrieb kann in Reihe mit einem Servomotor geschaltet werden, um den synchronen Ausgang mehrerer Schneckenräder zu realisieren. Diese JDLB-Schneckengetriebe eignen sich für den Einsatz in Bearbeitungsanlagen der Elektronik-, Kommunikations- und anderer Industrien.
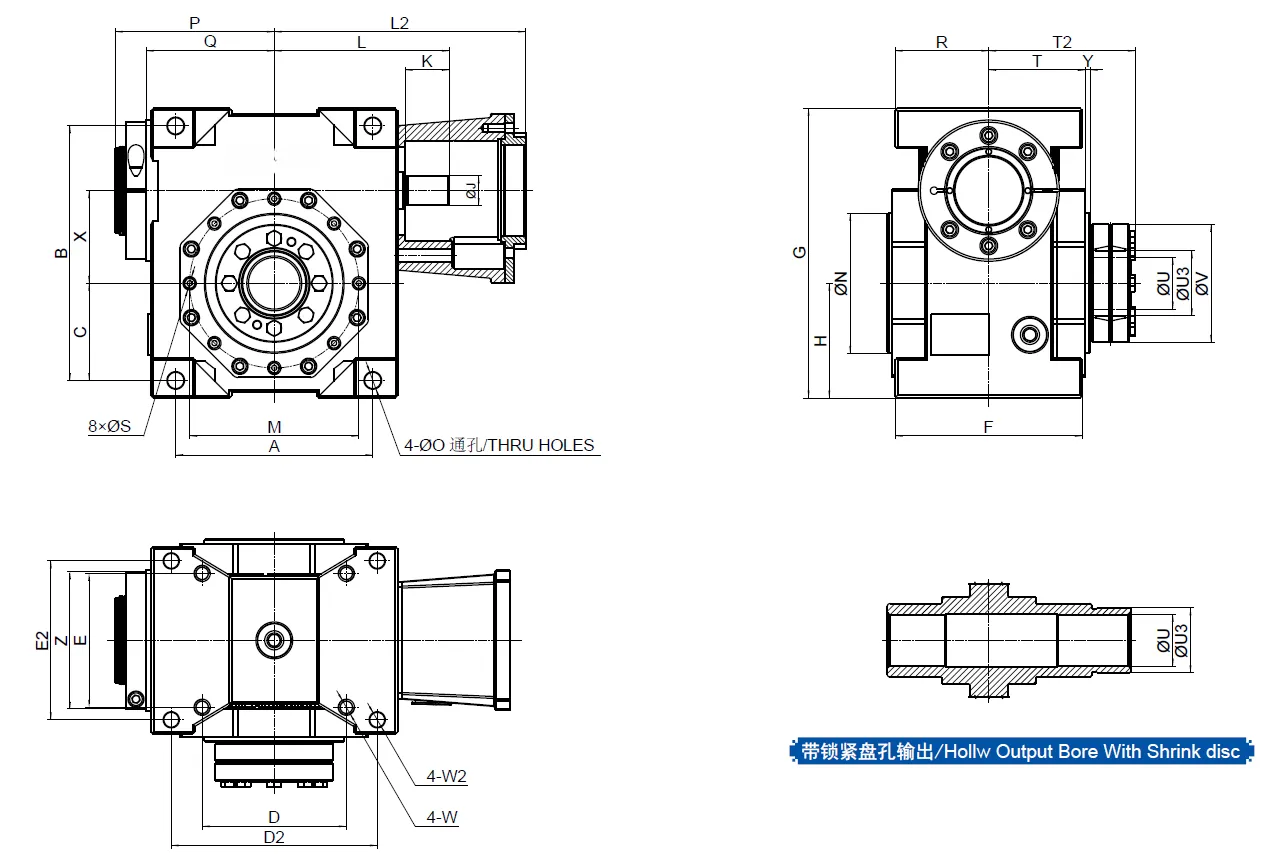
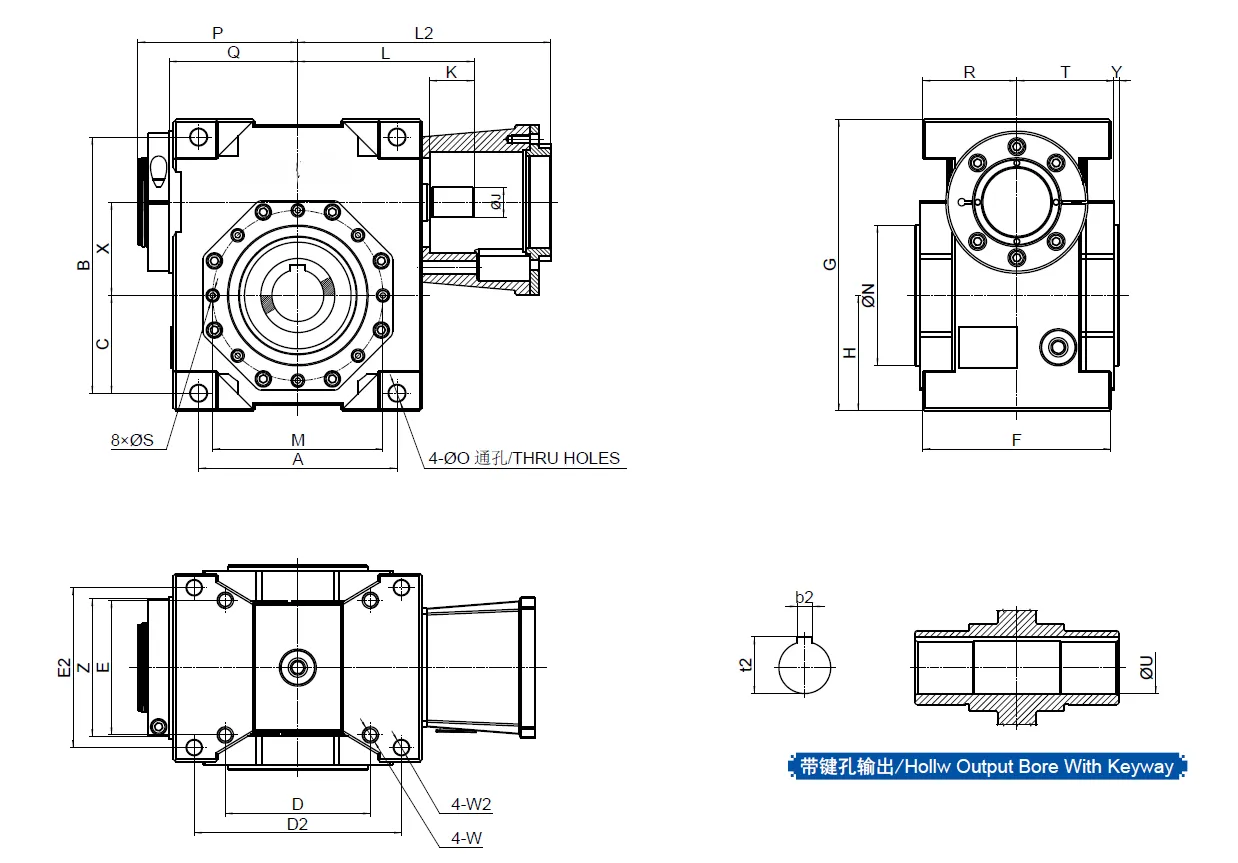
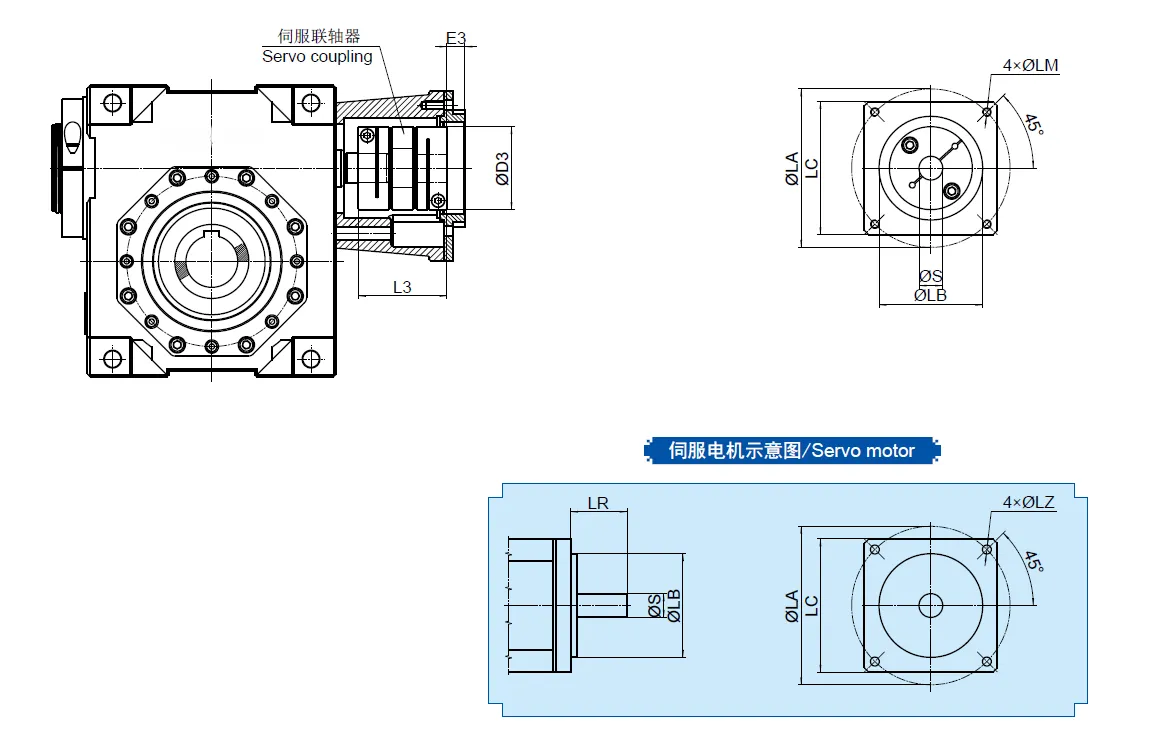
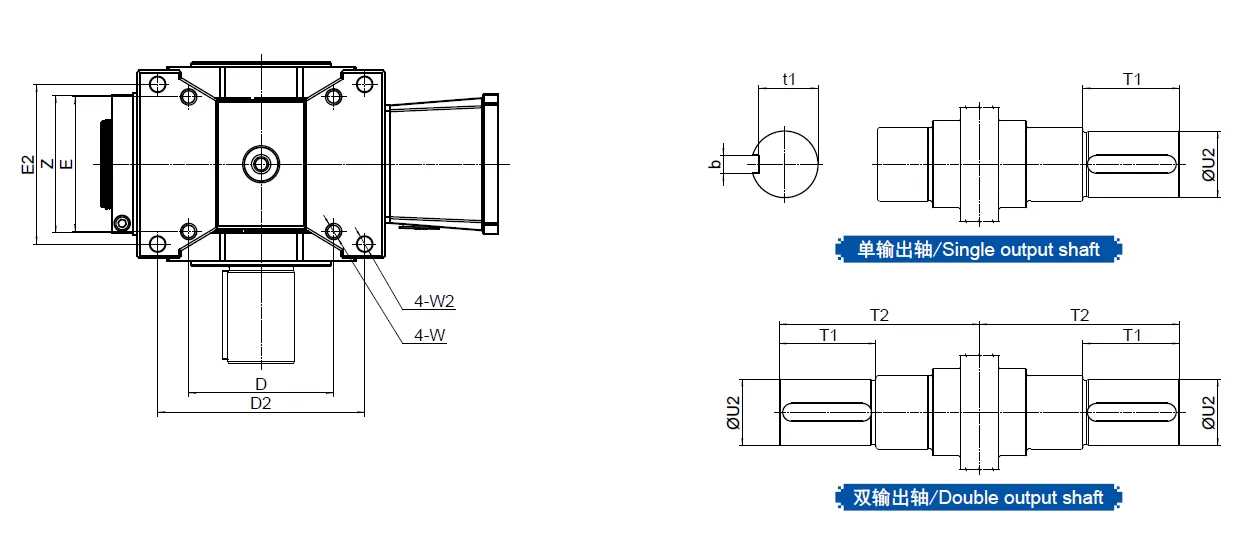
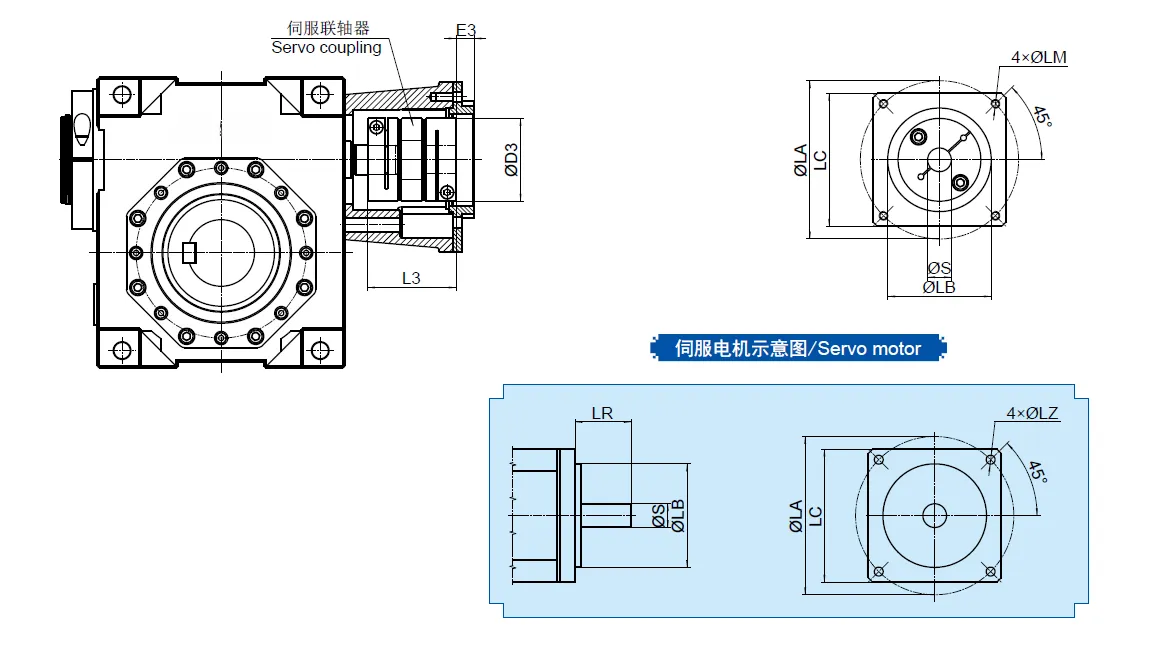
Abmessungen des hochpräzisen Schneckengetriebes der JDLB-Serie
| JDLB | 045 | 050 | 055 | 063 | 075 | 090 |
| A | 108 | 108 | 120 | 134 | 172 | 186 |
| B | 135 | 138 | 155 | 173 | 208 | 234 |
| C | 53 | 53 | 61 | 66 | 82 | 91 |
| D | 81 | 81 | 90 | 98 | 136 | 141 |
| D2 | 114 | 114 | 125 | 140 | 172 | 204 |
| T3 | 44 | 44 | 56 | 56 | 68 | 68 |
| E | 68 | 68 | 78 | 91 | 110 | 130 |
| E2 | 84 | 84 | 96 | 108 | 125 | 140 |
| E3 | 5 | 5 | 6.5 | 6.5 | 6.5 | 6.5 |
| F | 100 | 100 | 112 | 127 | 148 | 170 |
| G | 153 | 156 | 175 | 197 | 232 | 264 |
| H | 62 | 62 | 71 | 78 | 94 | 106 |
| J(h6) | 15 | 15 | 18 | 20 | 24 | 28 |
| K | 24 | 24 | 28 | 30 | 35 | 35 |
| L | 98.5 | 98.5 | 111 | 122 | 147 | 157 |
| L2 | 103+LR | 103+LR | 116+LR | 127+LR | 152+LR | 162+LR |
| L3 | 48 | 48 | 59.8 | 59.8 | 73.3 | 73.3 |
| M | 85 | 85 | 100 | 115 | 130 | 165 |
| N(h7) | 70 | 70 | 80 | 95 | 110 | 130 |
| O | 9 | 9 | 9 | 11 | 11 | 13 |
| P(max) | 91 | 91 | 100 | 108 | 129 | 139.5 |
| Q | 70.5 | 70.5 | 78 | 87 | 107 | 117.5 |
| R | 50 | 50 | 56 | 63.5 | 74 | 85 |
| S | M8 | M8 | M8 | M8 | M10 | M12 |
| T | 52 | 52 | 58 | 65.5 | 76 | 87 |
| T2 | 78 | 78 | 87 | 96.5 | 110 | 124 |
| U(H7) | 25 | 25 | 30 | 35 | 40 | 50 |
| U3 | 30 | 30 | 36 | 44 | 50 | 68 |
| V | 60 | 60 | 72 | 80 | 90 | 115 |
| W | M8 | M8 | M8 | M10 | M10 | M12 |
| W2 | 9 | 9 | 9 | 10 | 12 | 14 |
| X | 45 | 50 | 55 | 63 | 75 | 90 |
| Y | 3 | 3 | 3.5 | 3.5 | 4 | 4 |
| Z | 86 | 86 | 86 | 93 | 108 | 108 |
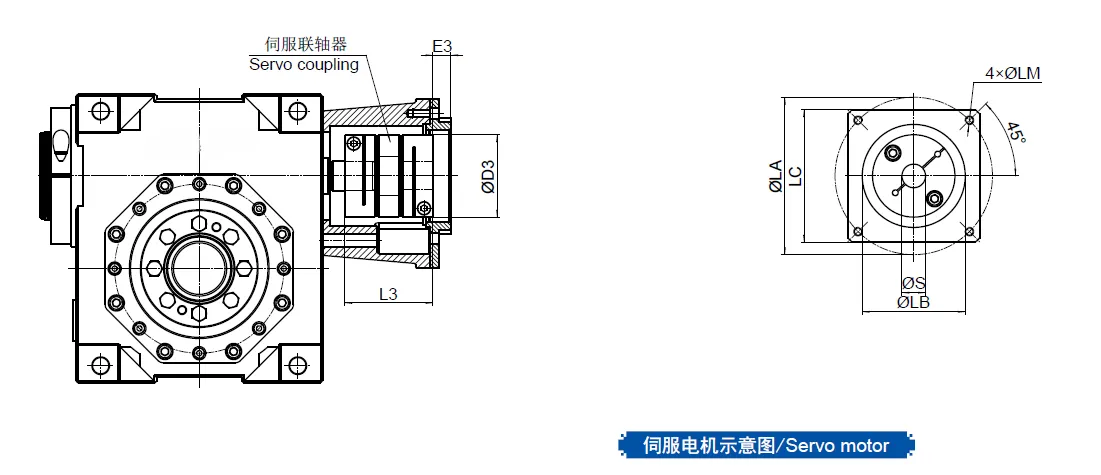
| LA/LB/LC/LR/LM/S | Durch Servomotor | |||||
| JDLB | 045 | 050 | 055 | 063 | 075 | 090 |
| A | 108 | 108 | 120 | 134 | 172 | 186 |
| B | 135 | 138 | 155 | 173 | 208 | 234 |
| C | 53 | 53 | 61 | 66 | 82 | 91 |
| D | 81 | 81 | 90 | 98 | 136 | 141 |
| D2 | 114 | 114 | 125 | 140 | 172 | 204 |
| T3 | 44 | 44 | 56 | 56 | 68 | 68 |
| E | 68 | 68 | 78 | 91 | 110 | 130 |
| E2 | 84 | 84 | 96 | 108 | 125 | 140 |
| E3 | 5 | 5 | 6.5 | 6.5 | 6.5 | 6.5 |
| F | 100 | 100 | 112 | 127 | 148 | 170 |
| G | 153 | 156 | 175 | 197 | 232 | 264 |
| H | 62 | 62 | 71 | 78 | 94 | 106 |
| J(h6) | 15 | 15 | 18 | 20 | 24 | 28 |
| K | 24 | 24 | 28 | 30 | 35 | 35 |
| L | 98.5 | 98.5 | 111 | 122 | 147 | 157 |
| L2 | 103+LR | 103+LR | 116+LR | 127+LR | 152+LR | 162+LR |
| L3 | 48 | 48 | 59.8 | 59.8 | 73.3 | 73.3 |
| M | 85 | 85 | 100 | 115 | 130 | 165 |
| N | 70 | 70 | 80 | 95 | 110 | 130 |
| O | 9 | 9 | 9 | 11 | 11 | 13 |
| P | 91 | 91 | 100 | 108 | 129 | 139.5 |
| Q | 70.5 | 70.5 | 78 | 87 | 107 | 117.5 |
| R | 50 | 50 | 56 | 63.5 | 74 | 85 |
| S | M8 | M8 | M8 | M8 | M10 | M12 |
| T | 52 | 52 | 58 | 65.5 | 76 | 87 |
| U(H7) | 25 | 25 | 30 | 35 | 40 | 50 |
| V | 60 | 60 | 72 | 80 | 90 | 115 |
| W | M8 | M8 | M8 | M10 | M10 | M12 |
| W2 | 9 | 9 | 9 | 10 | 12 | 14 |
| X | 45 | 50 | 55 | 63 | 75 | 90 |
| Y | 3 | 3 | 3.5 | 3.5 | 4 | 4 |
| Z | 86 | 86 | 86 | 93 | 108 | 108 |
| t2 | 27.8 | 27.8 | 33.3 | 38.3 | 43.3 | 53.8 |
| b2 | 6 | 6 | 8 | 10 | 12 | 14 |
| LA/LB/LC/LR/LM/S | Durch Servomotor | |||||

| JDLB | 045 | 050 | 055 | 063 | 075 | 090 |
| A | 108 | 108 | 120 | 134 | 172 | 186 |
| B | 135 | 138 | 155 | 173 | 208 | 234 |
| C | 53 | 53 | 61 | 66 | 82 | 91 |
| D | 81 | 81 | 90 | 98 | 136 | 141 |
| D2 | 114 | 114 | 125 | 140 | 172 | 204 |
| T3 | 44 | 44 | 56 | 56 | 68 | 68 |
| E | 68 | 68 | 78 | 91 | 110 | 130 |
| E2 | 84 | 84 | 96 | 108 | 125 | 140 |
| E3 | 5 | 5 | 6.5 | 6.5 | 6.5 | 6.5 |
| F | 100 | 100 | 112 | 127 | 148 | 170 |
| G | 153 | 156 | 175 | 197 | 232 | 264 |
| H | 62 | 62 | 71 | 78 | 94 | 106 |
| J(h6) | 15 | 15 | 18 | 20 | 24 | 28 |
| K | 24 | 24 | 28 | 30 | 35 | 35 |
| L | 98.5 | 98.5 | 111 | 122 | 147 | 157 |
| L2 | 103+LR | 103+LR | 116+LR | 127+LR | 152+LR | 162+LR |
| L3 | 48 | 48 | 59.8 | 59.8 | 73.3 | 73.3 |
| M | 85 | 85 | 100 | 115 | 130 | 165 |
| N | 70 | 70 | 80 | 95 | 110 | 130 |
| O | 9 | 9 | 9 | 11 | 11 | 13 |
| P | 91 | 91 | 100 | 108 | 129 | 139.5 |
| Q | 70.5 | 70.5 | 78 | 87 | 107 | 117.5 |
| R | 50 | 50 | 56 | 63.5 | 74 | 85 |
| S | M8 | M8 | M8 | M8 | M10 | M12 |
| T | 52 | 52 | 58 | 65.5 | 76 | 87 |
| T1 | 55 | 55 | 65 | 72 | 79 | 104 |
| T2 | 107 | 107 | 121 | 135.5 | 153 | 189 |
| U2(h6) | 35 | 35 | 40 | 45 | 50 | 65 |
| V | 60 | 60 | 72 | 80 | 90 | 115 |
| W | M8 | M8 | M8 | M10 | M10 | M12 |
| W2 | 9 | 9 | 9 | 10 | 12 | 14 |
| X | 45 | 50 | 55 | 63 | 75 | 90 |
| Y | 3 | 3 | 3.5 | 3.5 | 4 | 4 |
| Z | 86 | 86 | 86 | 93 | 108 | 108 |
| t1 | 30 | 30 | 35 | 39.5 | 44.5 | 58 |
| B | 10 | 10 | 12 | 14 | 14 | 16 |
| LA/LB/LC/LR/LM/S | Durch Servomotor | |||||
Merkmale des hochpräzisen Schneckengetriebes der JDLB-Serie
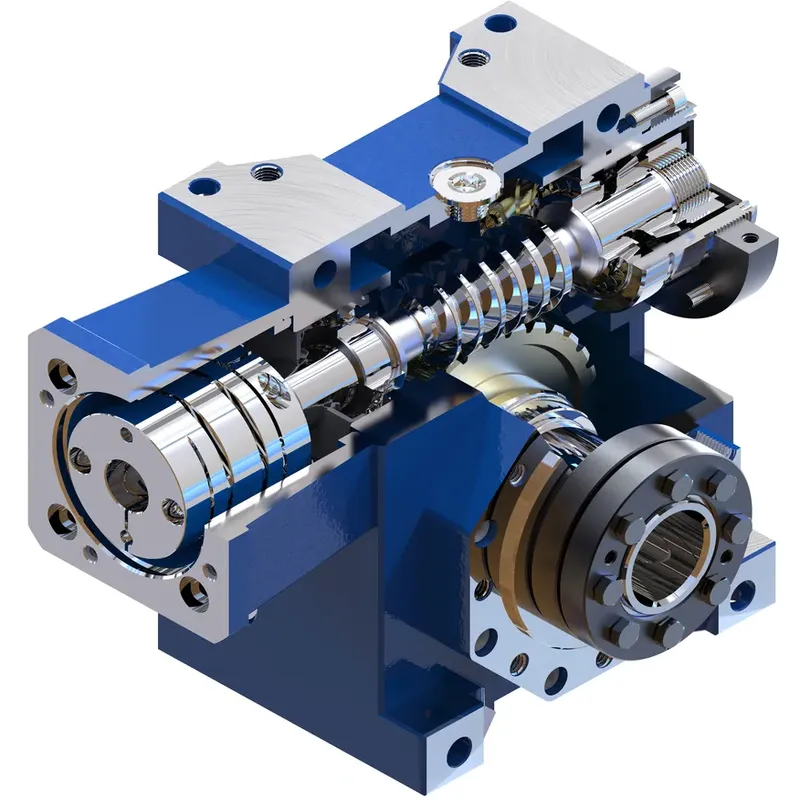
Das Präzisions-Schneckengetriebe der JDLB-Serie mit doppelter Steigung ist in sechs Baugrößen erhältlich: 45, 50, 55, 63, 75 und 90. Die linke und rechte Zahnflanke der Schnecke weisen unterschiedliche Steigungswinkel auf, was zu einer stufenlosen Änderung der Zahndicke führt. Dadurch lässt sich der Eingriffsspalt durch Verschieben der Schnecke anpassen.
1. Sechs vielseitige Größenoptionen
Das Schneckengetriebe der JDLB-Serie ist in sechs Baugrößen erhältlich: 45, 50, 55, 63, 75 und 90. Diese Optionen bieten Flexibilität für unterschiedlichste Anwendungsanforderungen und gewährleisten Kompatibilität mit verschiedenen Lastkapazitäten und Betriebsanforderungen. Die Baugrößen ermöglichen eine präzise Auswahl basierend auf spezifischen industriellen Anforderungen.
2. Einstellbares Schneckenradspiel
Das einzigartige Design des Schneckengetriebes umfasst linke und rechte Zahnflanken mit unterschiedlichen Steigungswinkeln, wodurch die Einstellung des Eingriffsspiels ermöglicht wird. Dies erlaubt die Feinabstimmung des Schneckengetriebespiels auf weniger als eine Bogenminute und gewährleistet so höchste Präzision und einen reibungslosen Betrieb auch bei kritischen Anwendungen.
3. Nachjustierbarer Maschenspalt
Nach längerem Gebrauch kann das Eingriffsspiel des Schneckenrades nachjustiert werden, um eine optimale Leistung zu gewährleisten. Diese Funktion erhöht die Langlebigkeit und Zuverlässigkeit des Getriebes und ermöglicht auch nach starker Beanspruchung im Betrieb gleichbleibende Präzision und Genauigkeit.
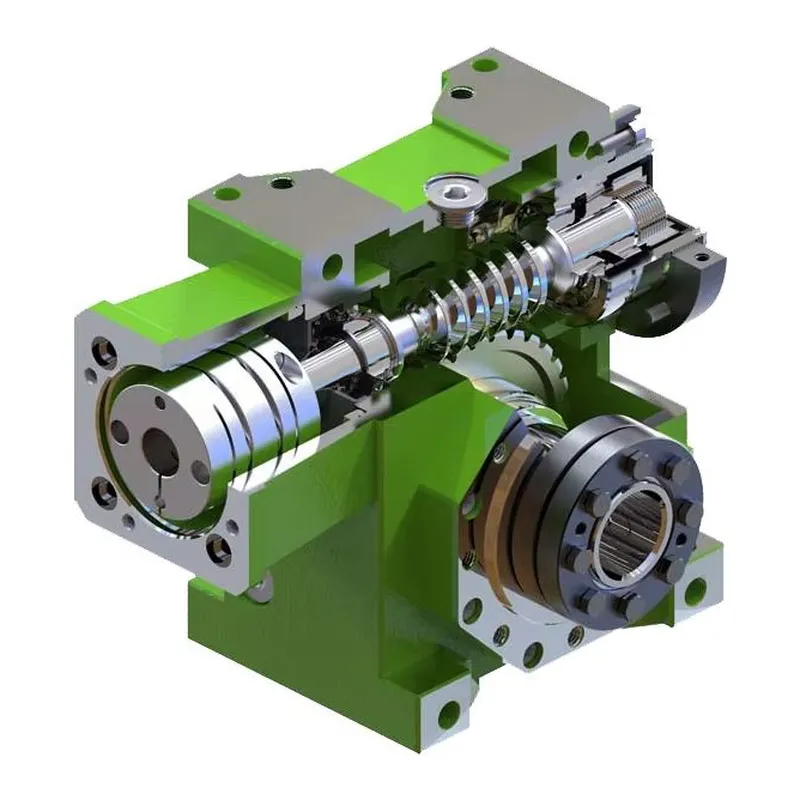
4. Zuverlässige Eingangsleistung durch Wellenkupplung
Das hochpräzise Schneckengetriebe der JDLB-Serie verwendet eine Wellenkupplung für den Eingang, die eine sichere und zuverlässige Verbindung gewährleistet. Diese Konstruktion eliminiert jegliches Spiel bei der Kraftübertragung und sorgt so für einen reibungslosen und präzisen Betrieb, selbst bei Anwendungen mit hohen Präzisionsanforderungen oder Drehmomenten.
5. Spielfreier Ausgang mit konischer Klemmringkupplung
Für den Abtrieb kommt eine konische Klemmringkupplung zum Einsatz, die eine sichere und spielfreie Verbindung gewährleistet. Dadurch kann das Getriebe präzise Bewegungs- und Drehmomentsteuerung ohne jegliches Spiel realisieren und eignet sich somit für Anwendungen, die hohe Genauigkeit und gleichbleibende Leistung erfordern.
6. Verbesserte Haltbarkeit und Präzision
Der präzise Doppelgewinde-Schneckenmechanismus gewährleistet eine stufenlose Änderung der Zahndicke und erhöht so die Lebensdauer des Getriebesystems. Diese Konstruktion gewährleistet einen dauerhaft zuverlässigen Betrieb und macht die hochpräzisen Schneckengetriebe der JDLB-Serie ideal für Branchen, in denen Präzision und Langlebigkeit entscheidend sind.
JDLB Hochpräzisions-Schneckengetriebe – Anwendungsbereiche
1. CNC-Werkzeugmaschinen
Die hochpräzisen Schneckengetriebe von JDLB werden in CNC-Maschinen häufig für präzise Positionierung und reibungslose Bewegungssteuerung eingesetzt. Dank ihrer Fähigkeit, Spiel zu minimieren, gewährleisten sie eine genaue Bearbeitung und eignen sich daher ideal für die Fertigung von Bauteilen mit engen Toleranzen und hoher Oberflächengüte.
2. Montagelinien
Diese hochpräzisen Schneckengetriebe spielen eine entscheidende Rolle in Montagelinien, indem sie eine präzise und zuverlässige Bewegungssteuerung gewährleisten. Sie sichern die genaue Positionierung von Bauteilen bei automatisierten Montageprozessen, verbessern die Effizienz, reduzieren Fehler und steigern die Gesamtproduktivität industrieller Fertigungssysteme.
3. Schneidemaschinen
In Schneidemaschinen ermöglichen JDLB-Schneckengetriebe eine präzise Bewegung von Sägeblatt oder Werkzeug und gewährleisten so saubere und genaue Schnitte. Dank ihres minimalen Spiels und ihrer robusten Bauweise eignen sie sich für Anwendungen wie Metallbearbeitung, Holzverarbeitung und Kunststoffbearbeitung, bei denen Präzision entscheidend ist.
4. Förderbänder
Die hochpräzisen Schneckengetriebe von JDLB werden in Förderanlagen eingesetzt, um den Materialtransport mit höchster Genauigkeit zu steuern. Ihr ruhiger Lauf und ihre Fähigkeit, hohe Lasten zu bewältigen, machen sie ideal für Branchen, die eine präzise Materialhandhabung erfordern, wie z. B. Verpackung, Lagerhaltung und Logistik.
5. Industrierobotik
Diese spielarmen Schneckengetriebe werden häufig in Roboterarmen und Manipulatoren zur präzisen Bewegungs- und Drehmomentsteuerung eingesetzt. Ihre hohe Präzision und Zuverlässigkeit ermöglichen reibungslose und genaue Roboterbewegungen und machen sie daher unverzichtbar für Aufgaben wie Schweißen, Lackieren und Materialhandhabung.
6. Medizinische Geräte
Die Schneckengetriebe der JDLB-Serie werden auch in hochentwickelten Medizingeräten eingesetzt, die eine präzise Bewegungssteuerung erfordern. Zu den Anwendungsbereichen zählen Bildgebungssysteme, Operationsroboter und Laborautomatisierungsanlagen, wo ihre Genauigkeit und Zuverlässigkeit entscheidend für einen sicheren und effektiven Betrieb in sensiblen Umgebungen sind.
Vorteile des spielarmen Schneckengetriebes der JDLB-Serie
Außergewöhnliche Präzision bei minimalem Spiel
Das Schneckengetriebe der JDLB-Serie zeichnet sich durch eine fortschrittliche Doppelgewinde-Schneckentechnologie aus, die eine Spielkorrektur auf weniger als eine Bogenminute ermöglicht. Dies gewährleistet präzise Positionierung und reibungslose Bewegungssteuerung und macht es ideal für Anwendungen, die höchste Genauigkeit erfordern, wie z. B. CNC-Maschinen und Roboter.
Langlebigkeit und dauerhafte Leistung
Das Getriebe ist aus hochwertigen Materialien gefertigt und auf langfristige Zuverlässigkeit ausgelegt. Die Möglichkeit, das Eingriffsspiel nach längerem Gebrauch nachzujustieren, gewährleistet eine gleichbleibende Leistung und verlängert die Lebensdauer des Getriebes, selbst in anspruchsvollen Industrieumgebungen.
Erhöhte Tragfähigkeit
Das hochpräzise Schneckengetriebe der JDLB-Serie ist für die Bewältigung hoher Belastungen bei gleichbleibender Genauigkeit ausgelegt. Seine robuste Konstruktion und effiziente Bauweise gewährleisten einen zuverlässigen Betrieb auch unter anspruchsvollen Bedingungen, beispielsweise in Förderanlagen, Montagelinien und Materialhandhabungsgeräten.
Reibungsloser und geräuschloser Betrieb
Dank optimierter Zahnradkonstruktion und hochpräziser Fertigung bietet das spielarme Schneckengetriebe von JDLB einen ruhigen und vibrationsfreien Lauf. Dadurch wird das Betriebsgeräusch minimiert, was es ideal für Umgebungen macht, in denen ein leiser Betrieb unerlässlich ist, wie beispielsweise bei Medizingeräten und automatisierten Laboranlagen.
Flexibles Design für vielfältige Anwendungen
Das Schneckengetriebe der JDLB-Serie bietet dank sechs verfügbarer Baugrößen und Kompatibilität mit verschiedenen Eingangs- und Ausgangskupplungssystemen vielseitige Einsatzmöglichkeiten. Diese Flexibilität ermöglicht die nahtlose Integration in unterschiedliche Anlagen und macht es somit für Branchen von der Fertigung bis hin zu Systemen für erneuerbare Energien geeignet.
Zuverlässige und spielfreie Kupplungsmechanismen
Das spielarme Schneckengetriebe verwendet eine Wellenkupplung für den Eingang und eine Kegelringkupplung für den Ausgang. Diese Kupplungssysteme eliminieren Spiel bei der Kraftübertragung und gewährleisten so eine präzise und gleichmäßige Bewegungssteuerung, selbst bei hohen Drehmomenten oder hohen Drehzahlen.
Zusätzliche Informationen
| Bearbeitet von | Yjx |
|---|
























